Mohrrube
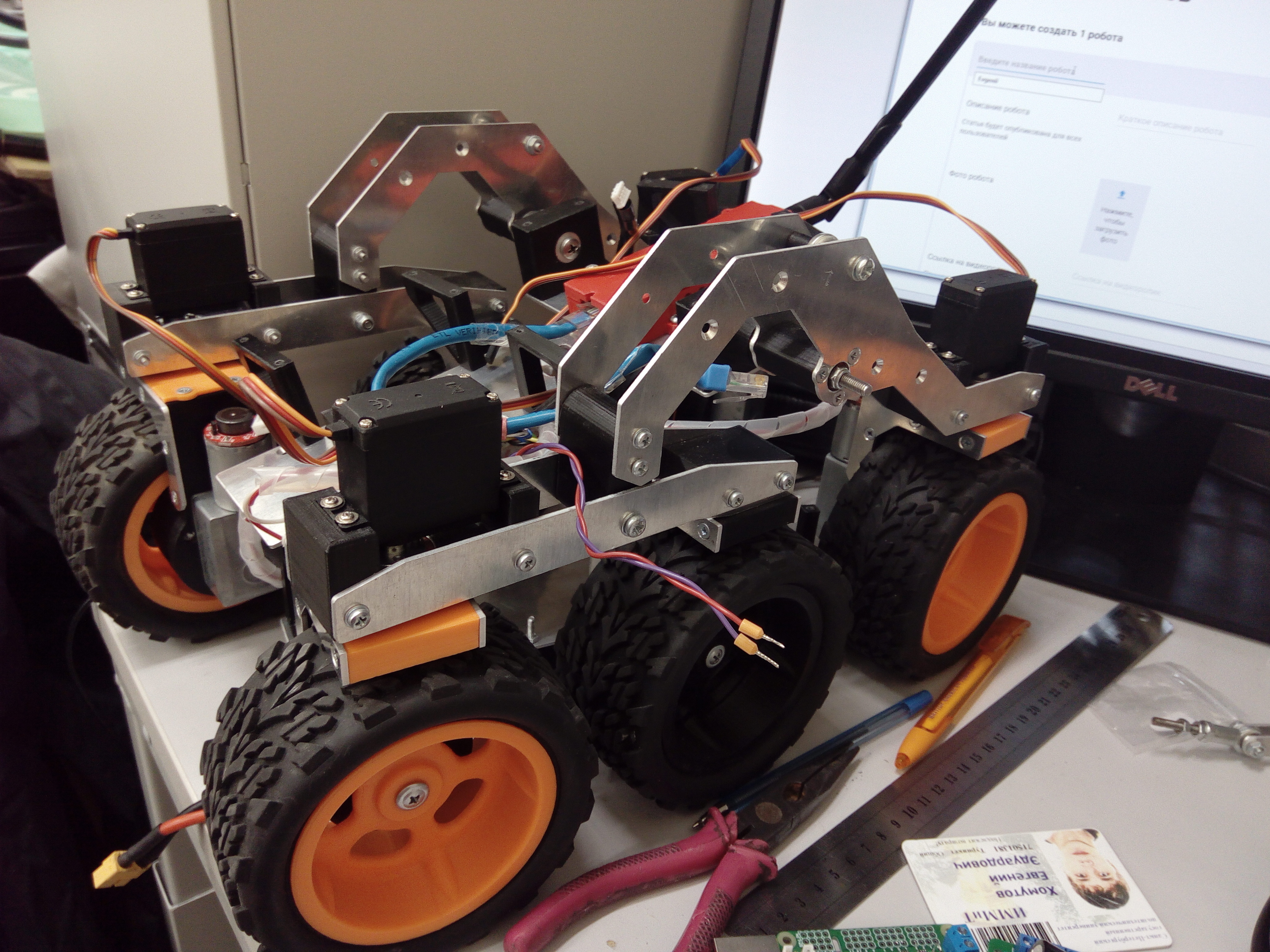
ROB-15852За основу взята шестиколесная платформа с подвижной подвеской от робота, зарекомендовавшего себя хорошо ранее. Центральная часть корпуса переконструирована и изменена, так как в предыдущей версии передняя часть робота была перепутана с задней. Будет установлена новая электроника, камера для возможности телеуправления и автономного следования по линии, а также возможно для автономного захвата маяка и преодоления некоторых испытаний полигона. Планируется установить манипулятор для захвата и перемещения маяков. Работа над роботом идет полным ходом.
Additional files
1535463374822.jpg
(4.07 MB)
{kind=link}
Add at 27.12.2024