URUS
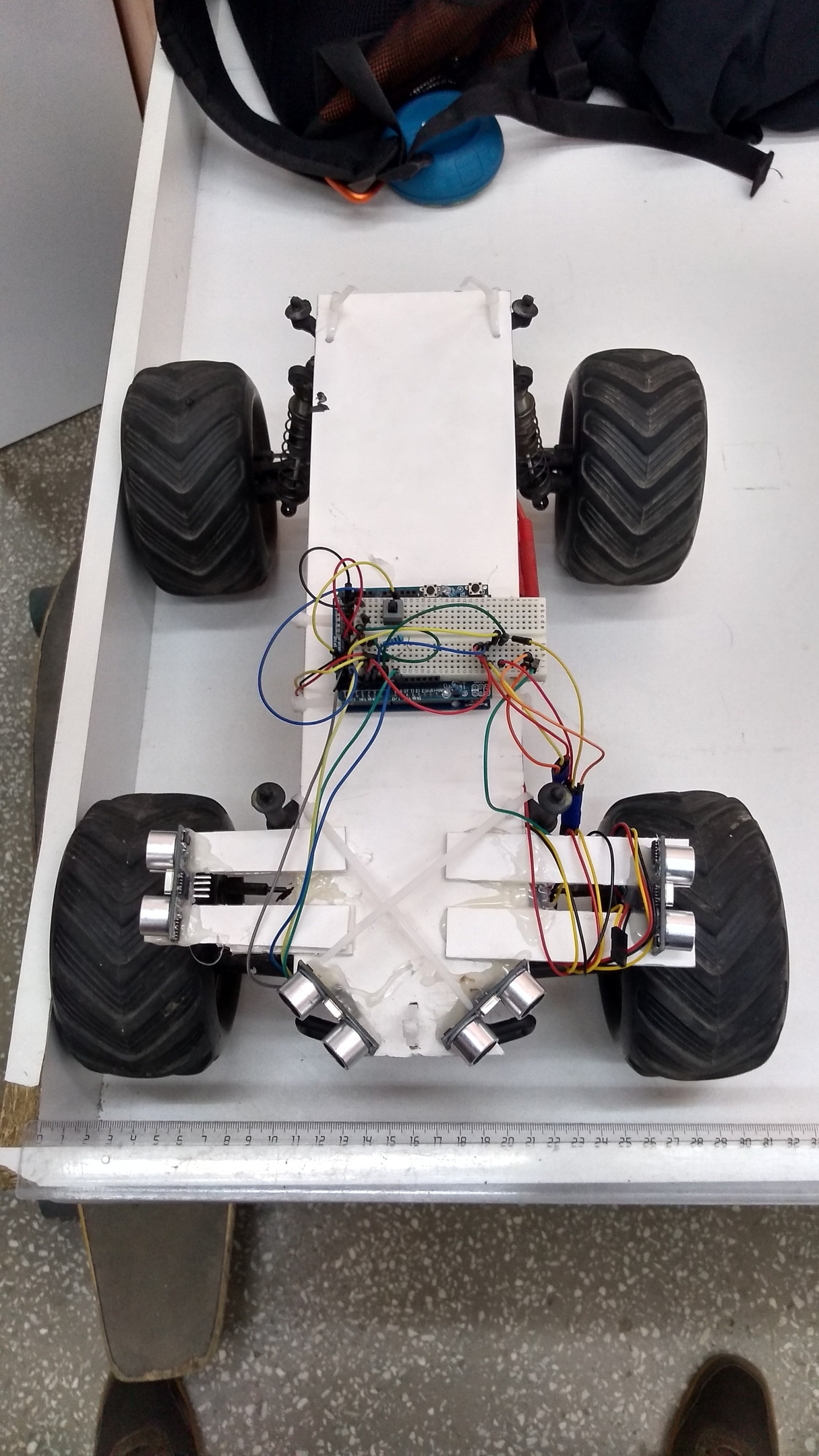
ROB-16220Главным компонентом на автономном роботе команды "Urus" является микроконтроллер Arduino Leonardo, который отвечает за все протекающие на роботе процессы. Шасси было взято с готовой радиоуправляемой модели Quanum Skull Crusher и доработано под поставленные перед нами задачи. На шасси реализован задний привод, дифференциал и независимая рычажная подвеска. В движение конструкцию приводит силовая установка в виде мощного контроллера и бесколлекторного мотора в котором отсуствуют щетки. Он позволяет снизить количество трущихся частей и увеличить мощность робота. Ориентация в пространстве происходит благодаря 4 датчикам расстояния которые работают по принципу ультразвуковых волн и инфракрасному датчику линии. Датчики расстояния разделены на две группы: фронтальные и боковые, первые определяют наличие резкого поворота спереди, а боковые постоянно следят за стеной сбоку. Датчик линии установлен как можно ниже для четкого обнаружения линий. Энергитическим ресурсом в нашем автономном роботе являются li-pol аккумуляторы с напряжением 3.7v, которые используются в паре последовательно для повышения напряжения, а соответсвенно и мощности . Пиковый ток для данных аккумуляторов составляет 220A. Также есть мягкий бампер из поролона для минимизации повреждений.
{kind=link}
{kind=link}