Umnaya mehanika
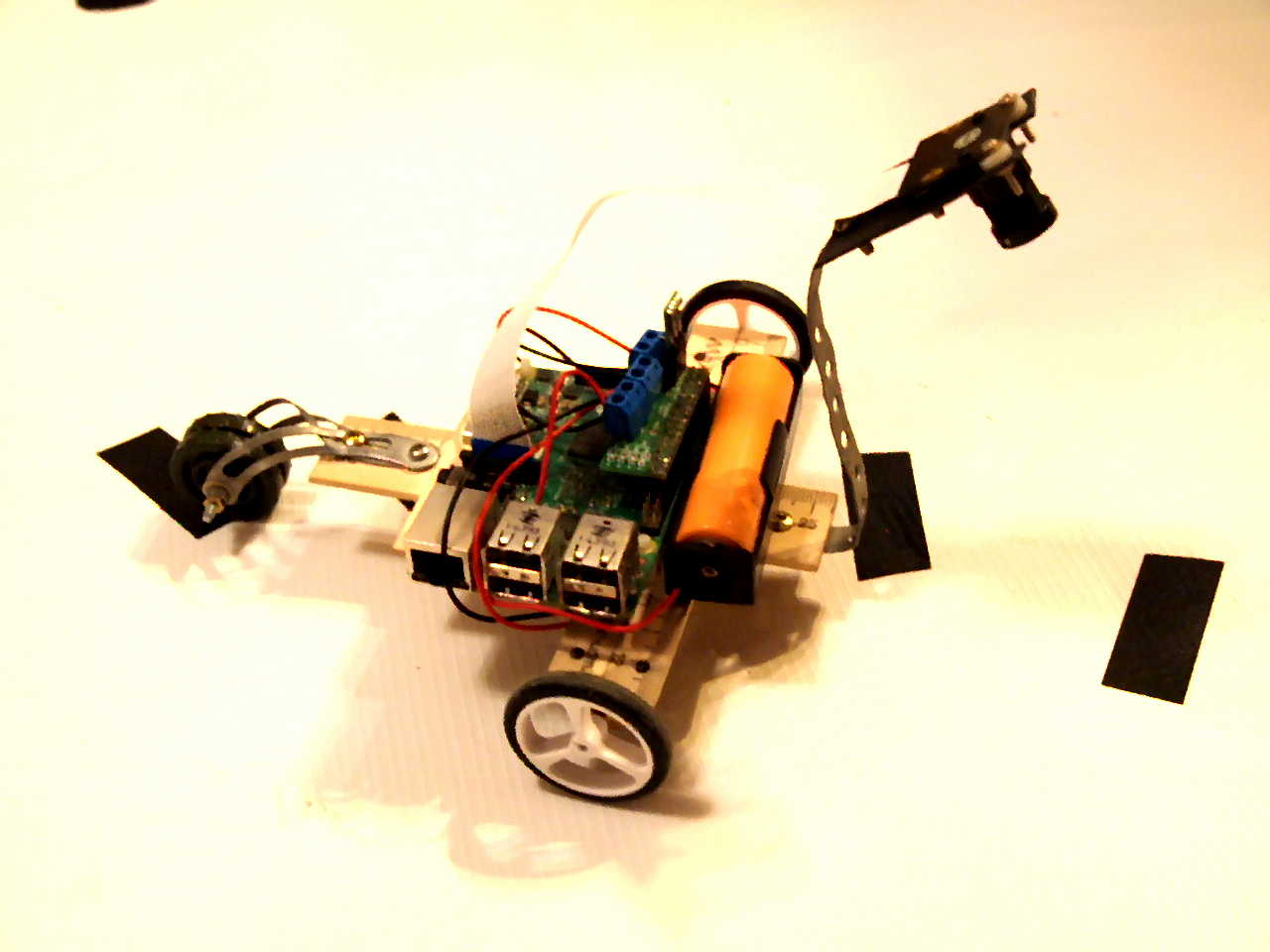
ROB-16240Робот на Raspberry Pi, использует стандартную камеру Raspicam. Собран на базе двух линеек Можга! Длина трассы на видео -- 10 метров. Робот состоит из трёх отрезков линеек, к которым прикреплен raspberry pi и два двигателя. Крепление заднего колеса, само колесо и крепление камеры взято из детского металлического конструктора. Передние два колеса - это колеса, купленные на сайте pololu.com. Питание обеспечивает литиевый аккумулятор от ноутбука. Моторы подключены с помощью драйвера двигателей pololu. Уникальность робота - это система управления, которую я написал на языке Си. Основное преимущество робота - это перекомпилированный драйвер камеры, который позволяет считывать картинку с частотой до 90 кадров в секунду, что обеспечивает устойчивое управление на высоких скоростях, это особенно важно на линии-профи.
Additional files
{kind=link}
Add at 10.12.2024