Volosatik
ROB-26554 Робот отслеживает угол поворота, может находить банки, но не определяет их
цвет.
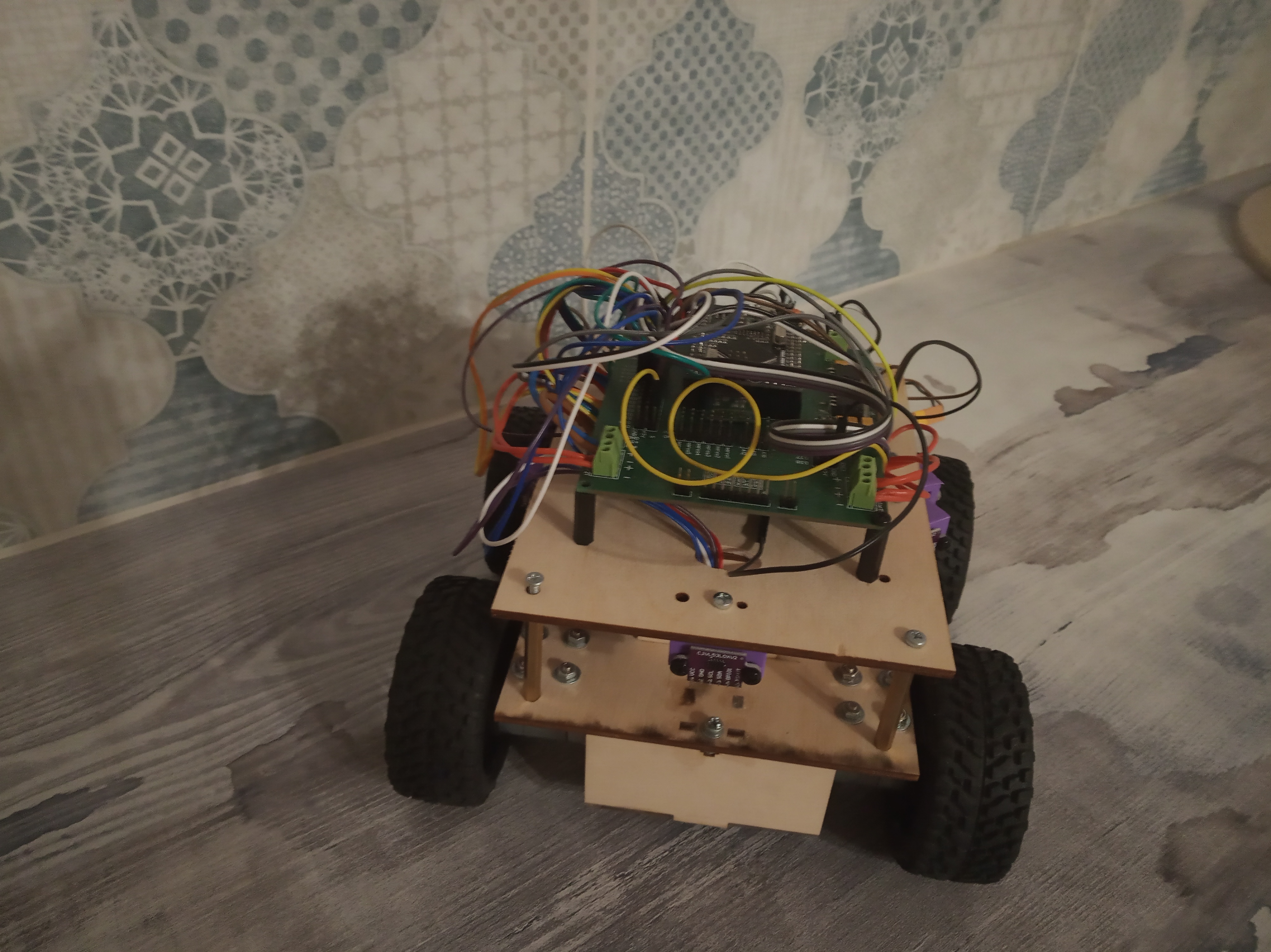
Робот собран на базе платы Arduino mega pro. Использована схема с четырьмя колесами и четырьмя
электрическими двигателями постоянного тока. Двигатели управляются попарно при
помощи драйвера двигателя, раздельно правый и левый борта машины. Для
управления роботом используется три инфракрасных датчика линии, один лазерный дальномер и электронный гироскоп
акселерометр.
Датчики линии расположены спереди и
сзади робота. С их помощью робот контролирует наезд на окружность кегельринга.
Лазерный дальномер используется для
поиска банок.
Повороты робота осуществляются при
помощи гироскопа.
files
Add at 22.11.2024
Add at 22.11.2024
Additional files
{kind=link}
Add at 22.11.2024