RobRazvitie
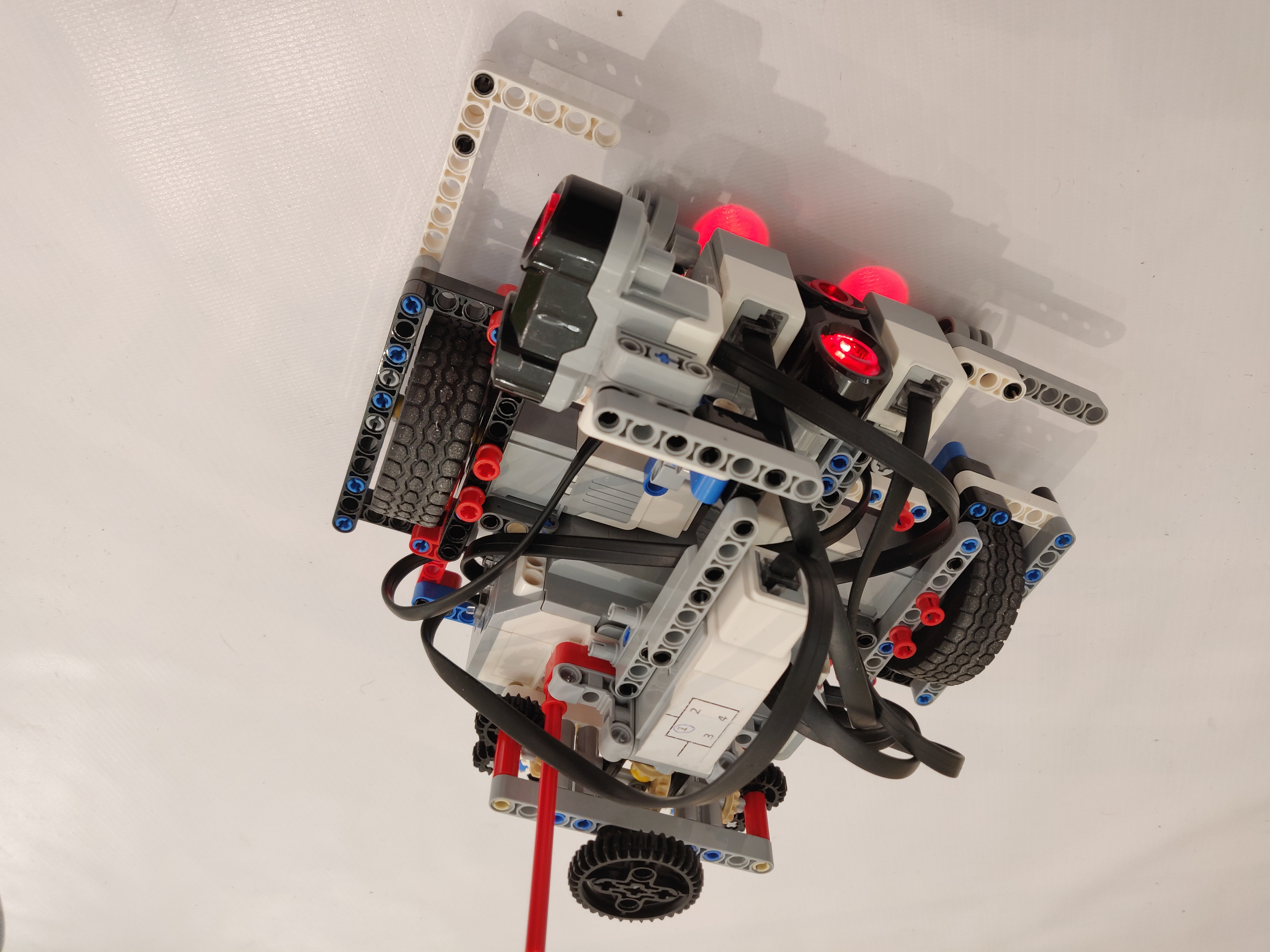
ROB-30322Робот выполнен из конструктора LEGO. Программа написана на стандартной среде программирования LEGO MINDSTORMS EV3. В роботе используются датчики цвета и освещенности EV3 для ориентации по черной и инвертированной линиях, а так-же датчики расстояния для поиска препятствий и ориентации в лабиринте. Сзади робота расположен захват для транспортировки кегли. Данный робот выполнен из конструктора LEGO MINDSTORMS EV3 и подготовлен специально для выполнения задания категории “Большое путешествие (старшая категория)”.
Программа была написана на в среде программирования LEGO MINDSTORMS EV3 на языке программирования EV3-G. В этом роботе используются датчики цвета и освещенности EV3 для ориентации по черной и инвертированной линии, а так-же ультразвуковые датчики расстояния для поиска препятствий и ориентации в лабиринте.
В качестве ведущих моторов, в роботе используются средние моторы EV3. Выбор пал именно на них, так как они обеспечивают более высокую скорость движения робота, имеют меньший физический люфт, в сравнении с большими моторами EV3, что дает меньшую задержку в реакции на черную линию. Из минусов, стоит отметить, что программирование робота на таких моторах сопряжено с некоторыми трудностями, а именно с тем, что при движении робота вперед левый мотор крутится против часовой стрелки (отрицательное направление), а правый – по часовой стрелке (положительное направление).
Робот оборудован задним захватом для переноса центральное кегли из поля "Кегельринг" обратно в зону старта. Этот захват приводится в действие с помощью среднего мотора EV3.
files
Add at 10.12.2024
Add at 10.12.2024
{kind=link}
Add at 10.12.2024