DogBot
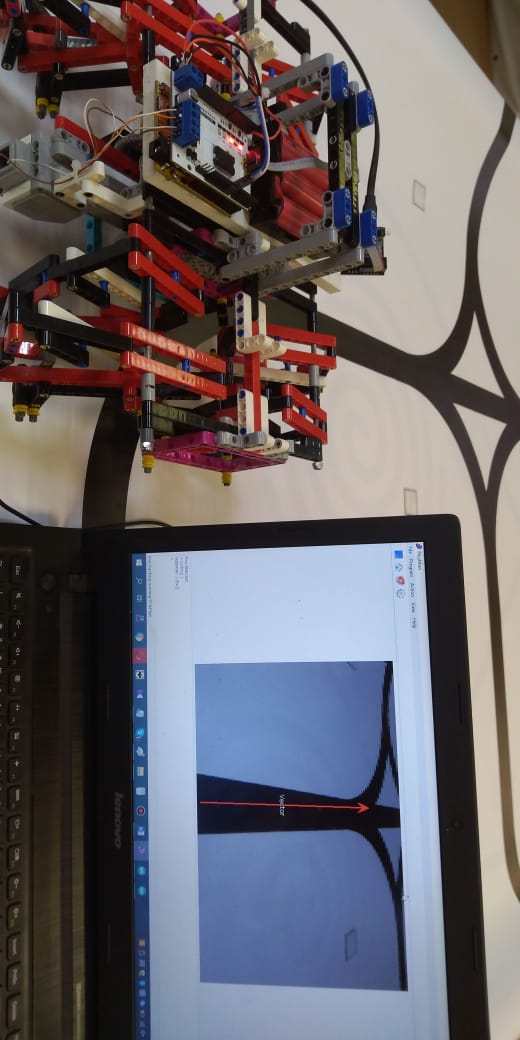
ROB-30894Робот собран с использованием деталей LEGO Mindstorms EV3, Spike Prime, трубок нержавеющих диаметром 4мм, платы Arduino Uno, камеры Pixy2. Использовали механизм для ног trotbot, основан на движение животных (к примеру, лошадь и собака) – рысь (trot). Рысь – двухтактный аллюр, на котором животное поочередно переставляет пары ног, расположенных по диагонали. Для устойчивости собрали 8 ног, по 4 с каждой стороны. 2 мотора для движения вперед-назад-вправо-влево, по 1 с каждой стороны. Для программирования взяли плату Arduino Uno, линию отслеживаем камерой Pixy2, в программной среде Arduino IDE используем для движения по линии ПД-регулятор. Вес робота 1,118 кг, размеры 38х34х20см.
Additional files
{kind=link}
Add at 10.12.2024