Licey3-Kotlas7
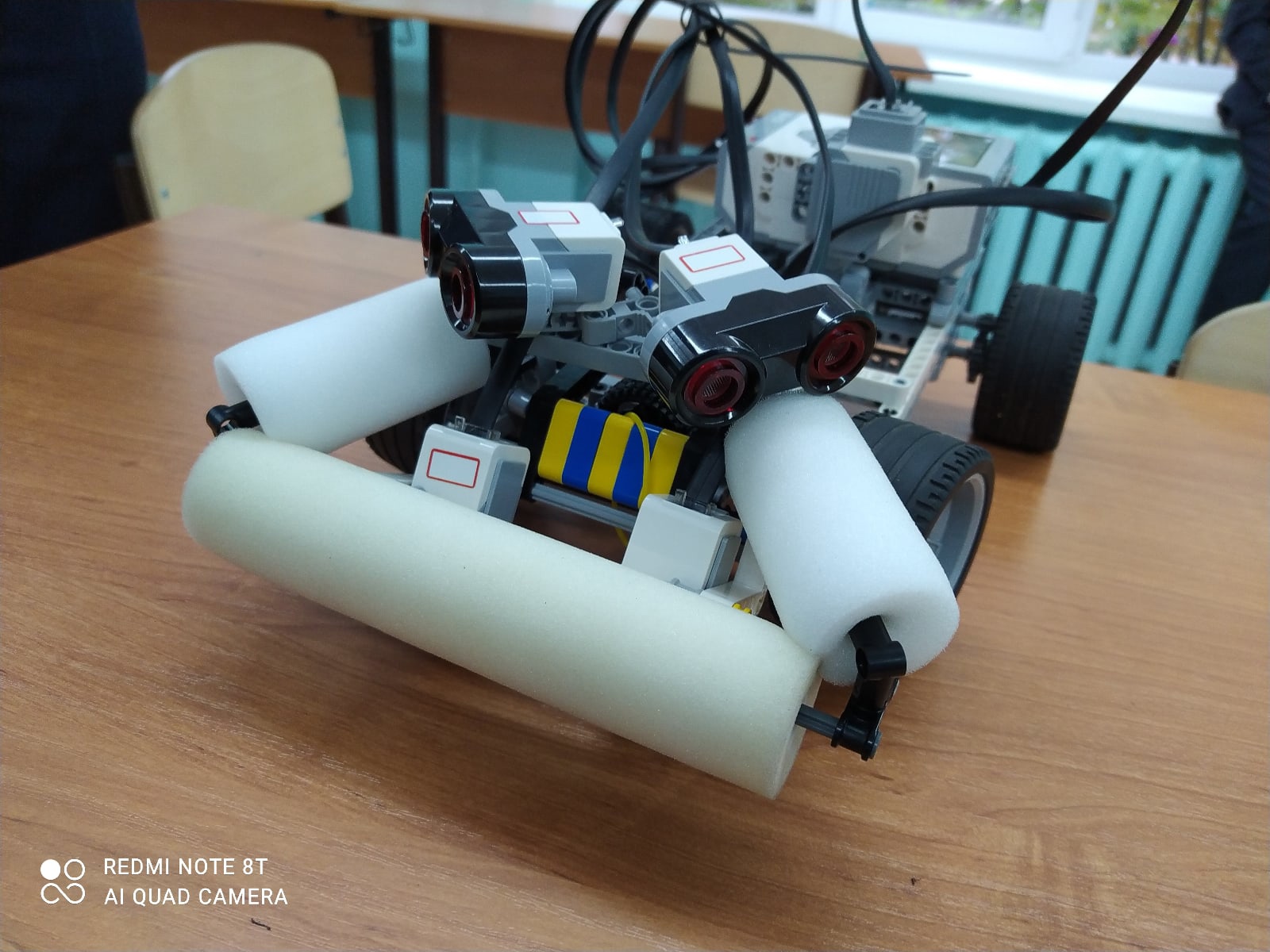
ROB-36107Наш робот - предназначен для езды по линии, преодоления небольших неровностей и езды между двух стен, для участия в соревнованиях Ралли по коридору . В нашем роботе присутствуют два датчика цвета EV3 (отраженный) два ультразвуковых дальномера. Наш робот создан на базе конструктора Mindstorm Education EV3.
Габариты нашего робота:
Длина:300 мм
Ширина:200 мм
Высота:150 мм
Большой мотор
Большой мотор—это мощный «умный» мотор. В нем есть встроенный датчик вращения с разрешением 1 градус для точного контроля. Большой мотор оптимизирован
Используя программные блоки «Рулевое управление» или «Независимое управление моторами» в программном обеспечении EV3, можно координировать работу двух моторов одновременно
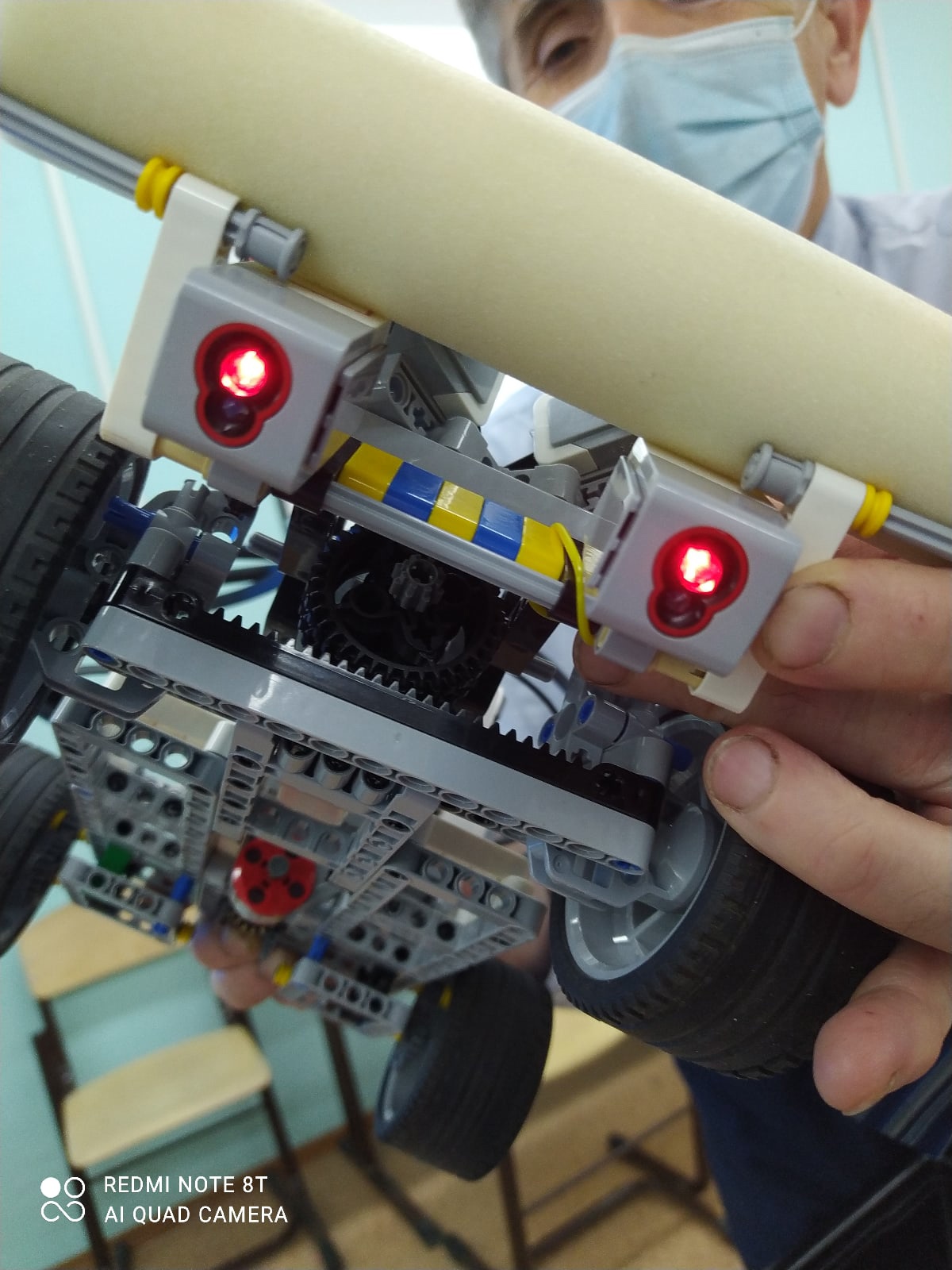
— Датчик расстояния
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета Датчик цвета — это цифровой датчик, который может определять цвет или яркость света, поступающего в небольшое окошко на лицевой стороне датчика. Этот датчик может работать в трех разных режимах: в режиме «Цвет», в режиме «Яркость отраженного света» и в режиме «Яркость внешнего освещения».
В режиме « Цвет » датчик цвета распознает семь цветов: черный, синий, зеленый, желтый, красный, белый и коричневый, а также отсутствие цвета. Эта способность различать цвета означает, что ваш робот может быть запрограммирован таким образом, чтобы он сортировал цветные мячи или кубики, произносил названия обнаруженных им цветов или прекращал действие, увидев красный цвет.
В режиме « яркость отраженного света » датчик цвета определяет яркость света, отраженного от лампы, излучающей красный свет. Датчик использует шкалу от 0 (очень темный) до 100 (очень светлый). Это означает, что ваш робот может быть запрограммирован таким образом, чтобы он двигался по белой поверхности до тех пор, пока не будет обнаружена черная линия, или чтобы он интерпретировал идентификационную карточку с цветовым кодом.
Additional files
{kind=link}
Add at 27.12.2024
Add at 27.12.2024
{kind=link}
Add at 27.12.2024