Nazhmi knopku otkroy kryshku
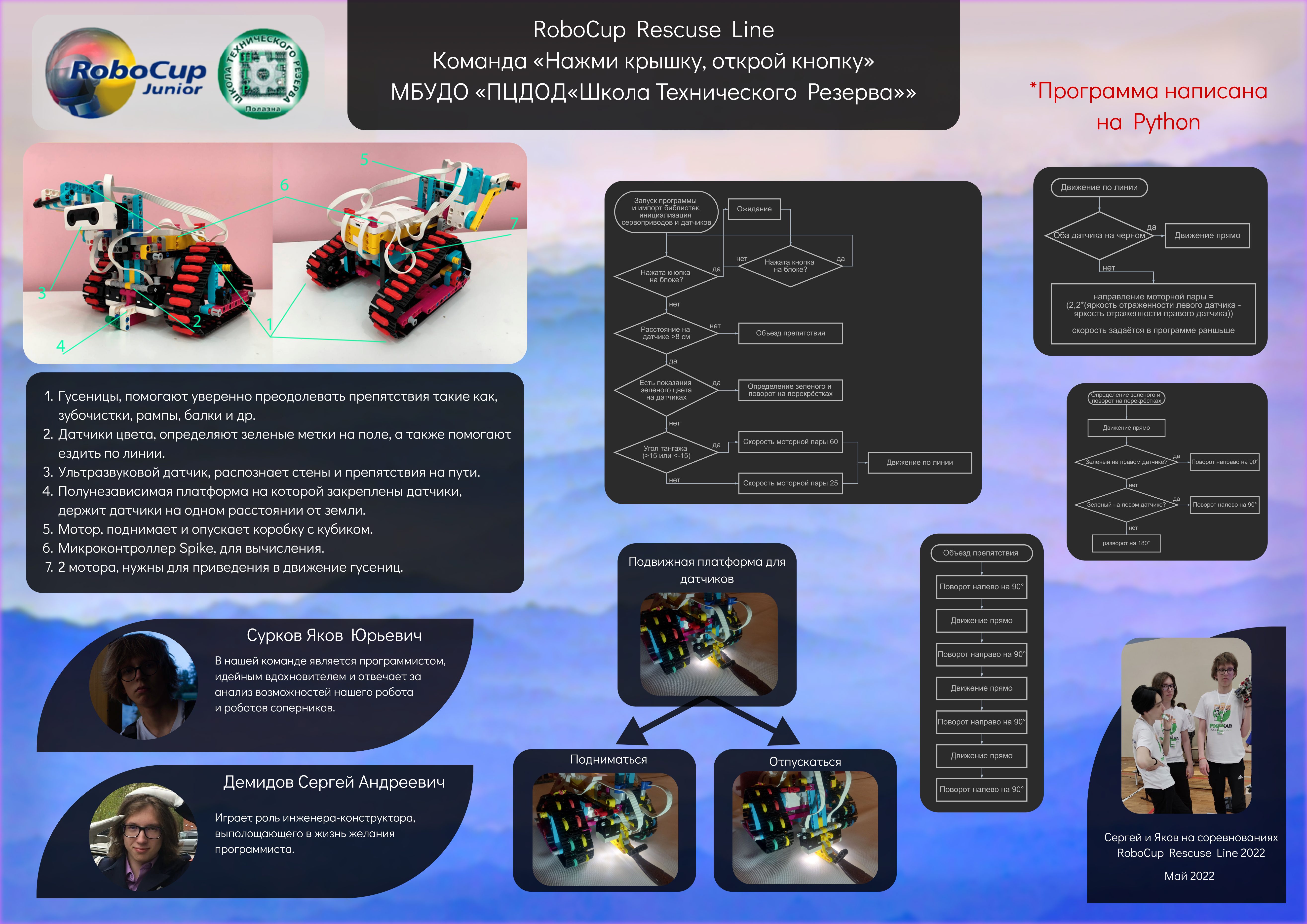
ROB-59467Робот собран на базе конструктора LEGO Spike Prime. При программировании был использован язык Python.
Робот состоит из одного микроконтроллера, трёх сервоприводов (два сервопривода используются для передвижения на поле и еще один для выгрузки спасательного комплекта), двух датчиков цвета для движения по линии и одного ультразвукового датчика для определения положения в зоне и для определения препятствий.
Для прохождения дверных проемов и для въезда в зону эвакуации было решено собрать максимально компактного робота. Для прохождения препятствия используем полный привод, благодаря гусеницам.
Датчики цвета сконструированы, так что их положение максимально независимо от положения робота.
При помощи ультразвукового датчика мы обнаруживаем кирпич и находим выход из зоны эвакуации. Наш робот учится с прошлых лет и теперь не толкает кирпич, а аккуратно его объезжает.
files
{kind=link}
Add at 10.12.2024