PERVYY
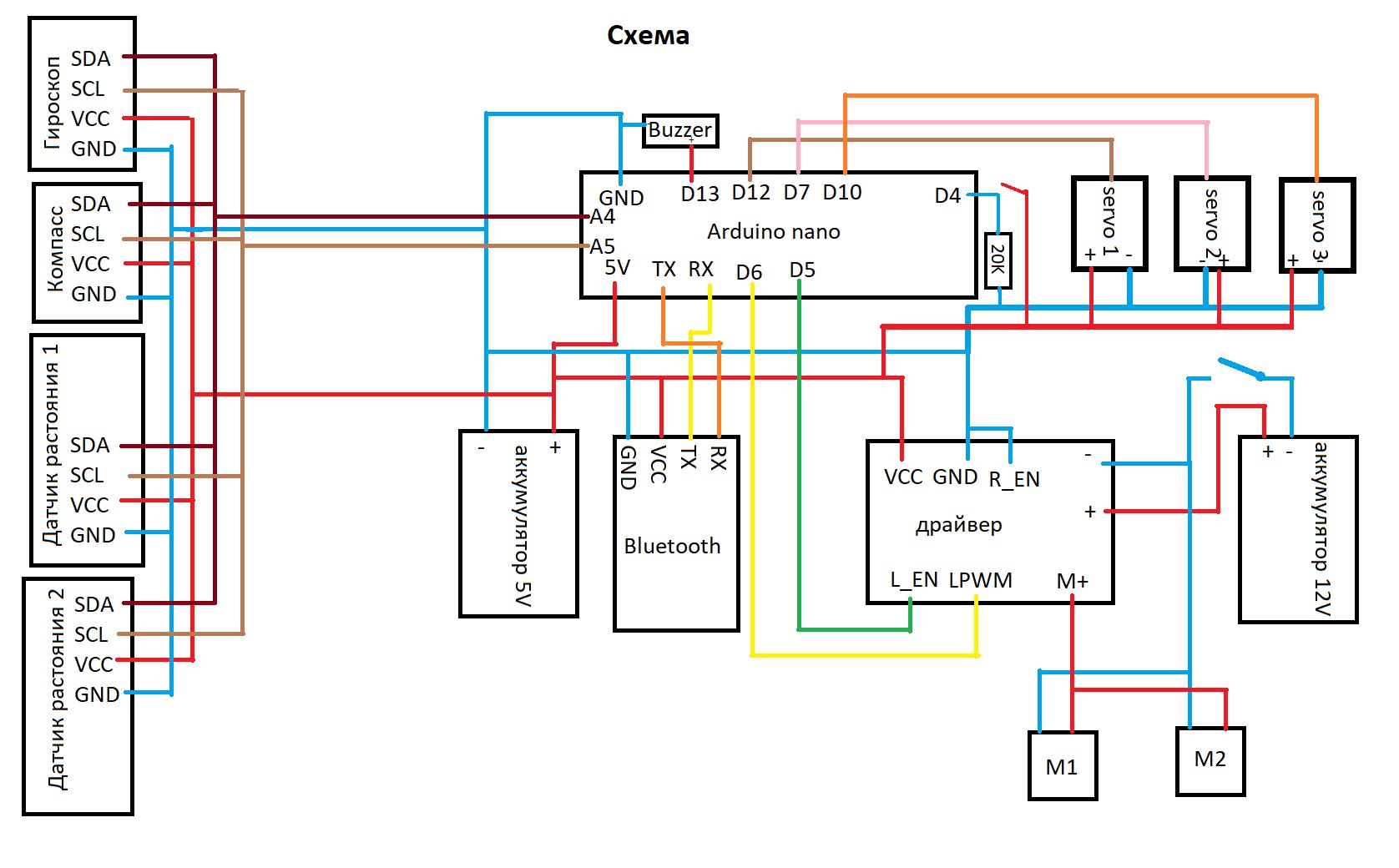
ROB-59780Беспилотный автономный надводный аппарат, в состав которого входят:
- 2 инфракрасных лидара TF-Luna Tof
- 3-х осевой магнитометр (компас) GY-273
- гироскоп GY-521
- Bluetooth модуль CC2540
- Arduino nano AtMega 328p
- 2 щёточных мотора постоянного тока
- драйвер мотора BTS7960
- 3 сервопривода
Позиционирование робота с помощью определения расстояния до ботов бассейна 2 лидарами, которые ориентируются перпендикулярно бортам с помощью гироскопа и магнитометра.
Разработано приложение для мобильного устройства которое реализует удобный интерфейс с катамараном.
взаимодействие приложения и робота осуществляется по беспроводной технологии Bluetooth. Разработан свой протокол обмена данными.
Все датчики соединены в единую шину, работающую по протоколу I2C.
Sketch arduino: https://github.com/tikhonsmovzh/Ship_Debbuger/tree/master/navigationReg
files
Add at 20.11.2024
Add at 20.11.2024