Super
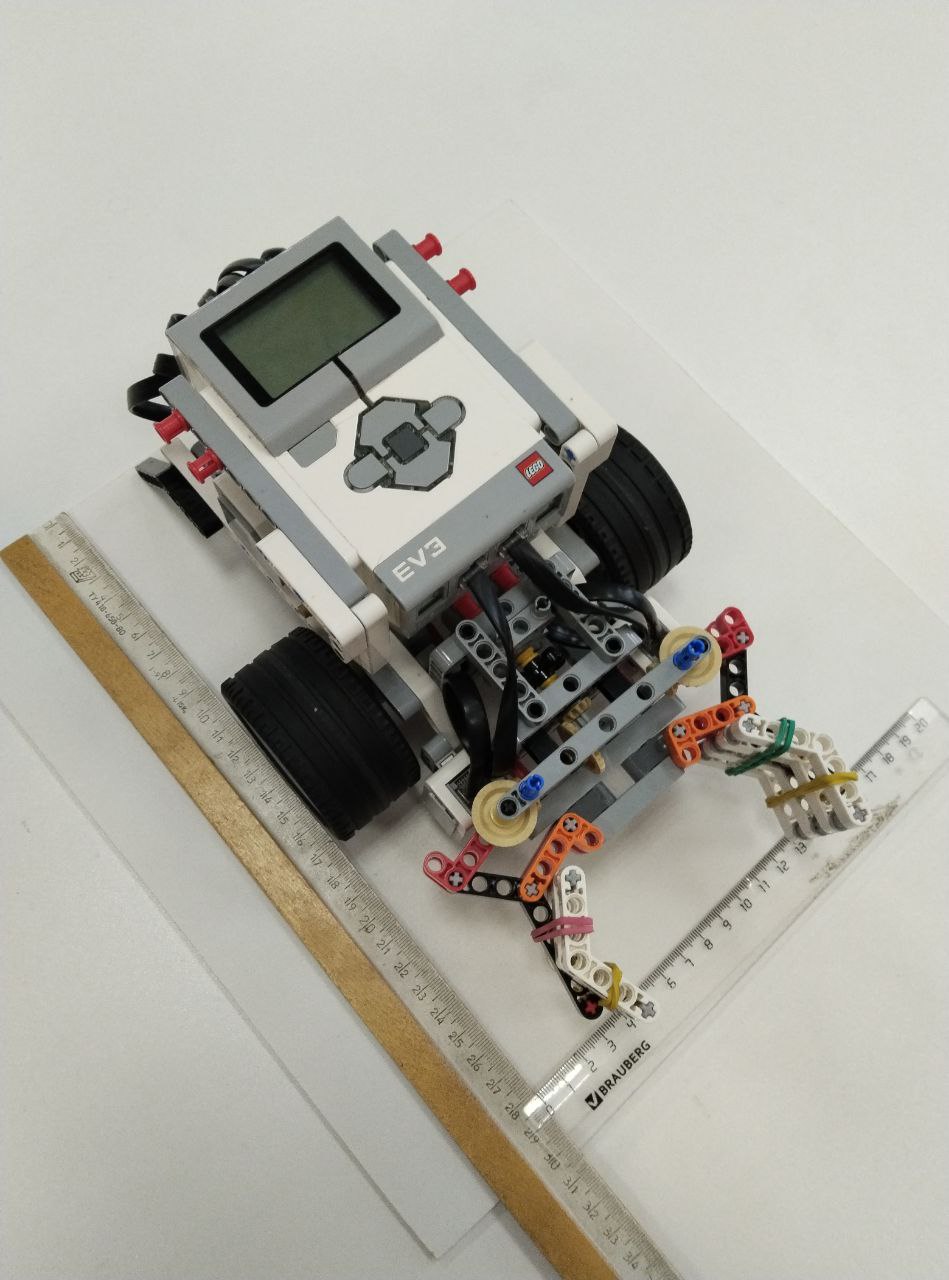
ROB-60587В конструкции робота "Супер" за основу взята «приводная платформа с передним приводом». Две пары колес сзади для устойчивости. К модели добавлены два датчика освещенности Lego EV3 для движения по линии. Робот имеет механизм grab and lift для захвата и удержания эстафетной палочки на среднем моторе. Общение роботов между собой на старте и при передаче эстафетной палочки происходит при помощи встроенного Bluetooth модуля. При движении по линии алгоритм основан на PID-регуляторе (простой). Основная программа состоит из "моих блоков". Для уверенного прохождения горки и барьеров у нас есть свой секрет.
Additional files
Супер размеры.jpg
(130.18 KB)
{kind=link}
Add at 27.12.2024