Sistema upravleniya manipulyatorom s obratnoy taktilnoy svyazyu 2.0
ROB-77637Платформа: Система управления манипуляторами с обратной тактильной связью собрана на базе платформы Arduino
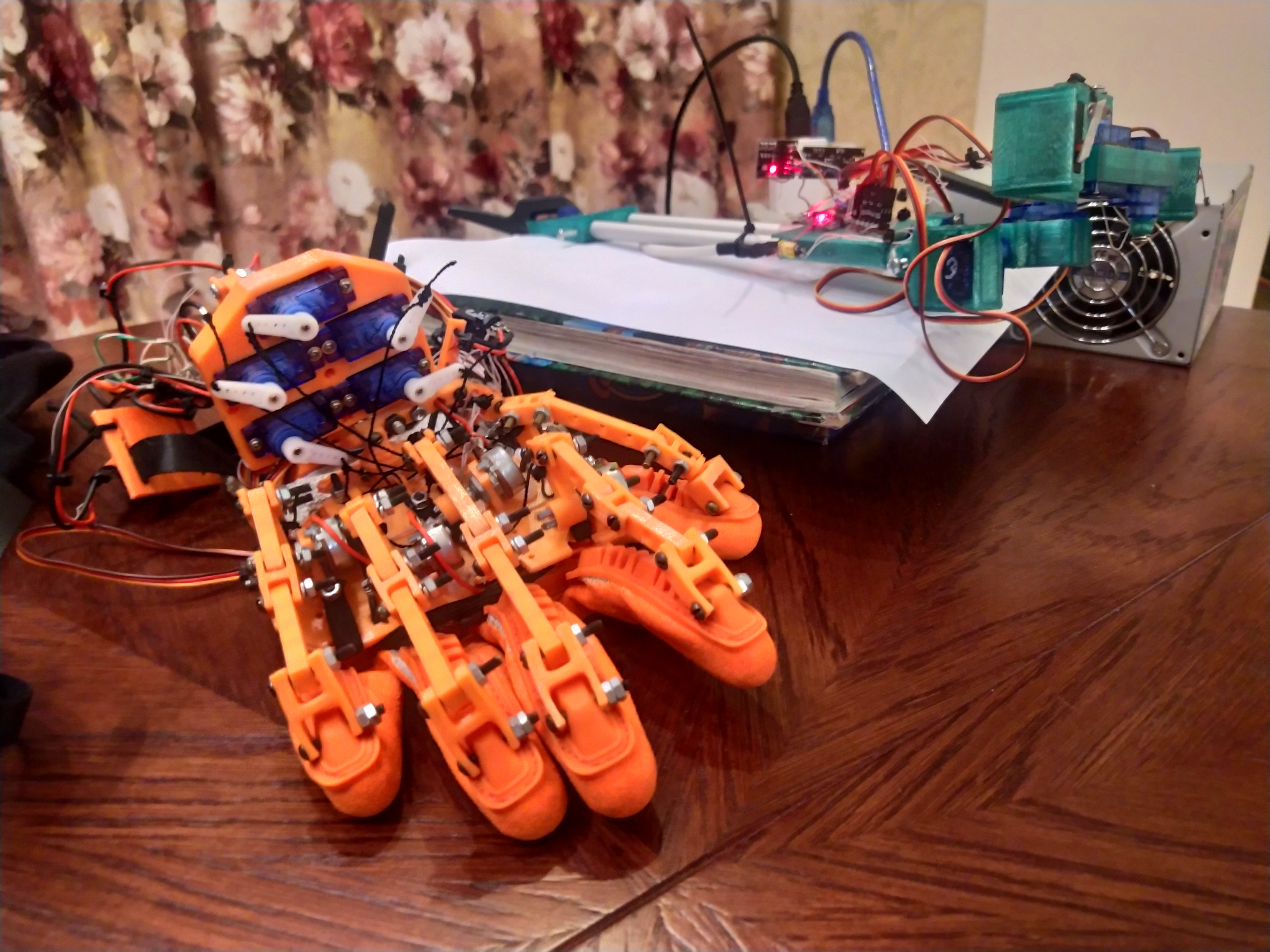
Конструкция(взрывсхема): Система представляет из себя перчатку и рукав, которые считывают движение пальцев, кистевого локтевого и плечевого суставов, а также демонстрационный манипулятор, который включает в себя кисть - клешню и кистевой сустав, и плечо с предплечьем. Система работает, и манипулятор полностью повторяет движения руки оператора. Также в разработке находится новый прототип. Уже готовы новая более удобная считывающая система и манипулятор, который теперь управляется с помощью координат. То есть система вычисляет координаты кисти оператора и передаёт на манипулятор, а он в свою очередь перемещает клешню в указанную точку.
Используемые датчики и моторы: Для работы проекта были использованы: потенциометры для считывания движений оператора и сервоприводы для приведения конечностей манипулятора в движение, а также самодельные датчики сгиба, сделанные из светодиода, фоторезистора и силиконовой трубки, и шаговые двигатели для работы обратной тактильной связи.
Также для работы нового манипулятора была разработана библиотека на языке программирования C++.
Алгоритм действия рабочего прототипа (видео): Arduino на считывающей системе считывает данные со всех потенциометров и отправляет их на Arduino на манипуляторе, и в то же время управляет сервоприводами отвечающими за обратную тактильную связь. Arduino на манипуляторе принимает сигнал и посылает его на сервоприводы, считывает сигналы с концевиков, если нажат хотя бы один, отправляет сигнал на перчатку, которая в свою очередь блокирует определённый сервопривод, тем самым создавая сопротивление пальцу оператора.
Алгоритм действия нового робота: Arduino на считывающей системе считывает данные со всех потенциометров, вычисляет координаты кисти оператора и отправляет их на Arduino на манипуляторе, и в то же время управляет шаговыми двигателями отвечающими за обратную тактильную связь. Arduino на манипуляторе принимает сигнал и посылает его на сервоприводы, считывает сигналы с датчиков давления и отправляет сигнал на перчатку, которая в свою очередь приводит в действие шаговый двигатель, тем самым создавая сопротивление пальцу оператора.
Предназначение робота: Система управления манипуляторами с обратной тактильной связью призвана сделать управление манипуляторами интуитивным и понятным каждому, а также уменьшить вероятность столкновения манипулятора с посторонними объектами и деформации переносимого объекта, за счёт добавления осязания к управлению манипулятором (система даёт оператору возможность почувствовать то что “чувствует” манипулятор). Ведь, на данный момент для управления манипуляторами используются обычные джойстики и кнопки, из-за чего оператору манипулятора необходимо проходить длительное обучение. Также несовершенство нынешней (джойстиковой) системы управления, а именно её неитуитивность и необходимость оператору поддерживать постоянный зрительный контакт с манипулятором, оценивать примерные размеры переносимого объекта и расстояние от объекта до окружения, создаёт огромный риск деформации окружающих объектов, манипулятора и переносимого объекта.
Наша система также призвана помочь при проведении опасных исследований, например, в качестве манипулятора за бортом батискафа, с помощью которого учёные буквально смогут “потрогать” океаническое дно. Также наша система поможет при проведении “удалённых операций”, например, если человеку срочно требуется операция, а хирурга, который смог бы её провести, нет в соседних городах, квалифицированный хирург сможет принять непосредственное участие в проведении операции с помощью нашей системы и медицинского манипулятора. Также в данный момент в производства продолжают активно внедрять автоматизированные системы, например, манипулятор, сваривающий детали, для работы которых приходится вручную создавать программу-траекторию - список координат, в которые захват манипулятора должен переместиться, и параметры сварки в каждой точке. На данный момент подобные программы создаются с помощью квалифицированных специалистов, которым приходится использовать не интуитивный в управлении пульт для записи каждой координаты вручную. С помощью нашей системы достаточно будет пригласить опытного сварщика и попросить его сделать все сварные швы, будучи одетым в нашу систему управления, благодаря чему мы сможем получить точную программу-траекторию за более короткий срок. Также проект может быть применим в любых других опасных для жизни человека ситуациях.
На данный момент робот находится в стадии перехода от старого прототипа к новому, поэтому описание содержит элементы для каждого из прототипов.
files
Add at 10.12.2024
Add at 10.12.2024
Add at 10.12.2024
Add at 10.12.2024
Additional files
{kind=link}
Add at 10.12.2024
{kind=link}
Add at 10.12.2024
Add at 10.12.2024
Add at 10.12.2024
Add at 10.12.2024
Add at 10.12.2024