Privetik
ROB-78216Управляемый робот для участия в этапе соревнования Кубок РТК
Для управления применяется система радиоуправления на основе стандартного пульта и приемника FlySky. Данные с приемника поступают на основной микроконтроллер Arduino Nano где расшифровываются и на основании полученных данных происходит управление сервоприводами и моторами.
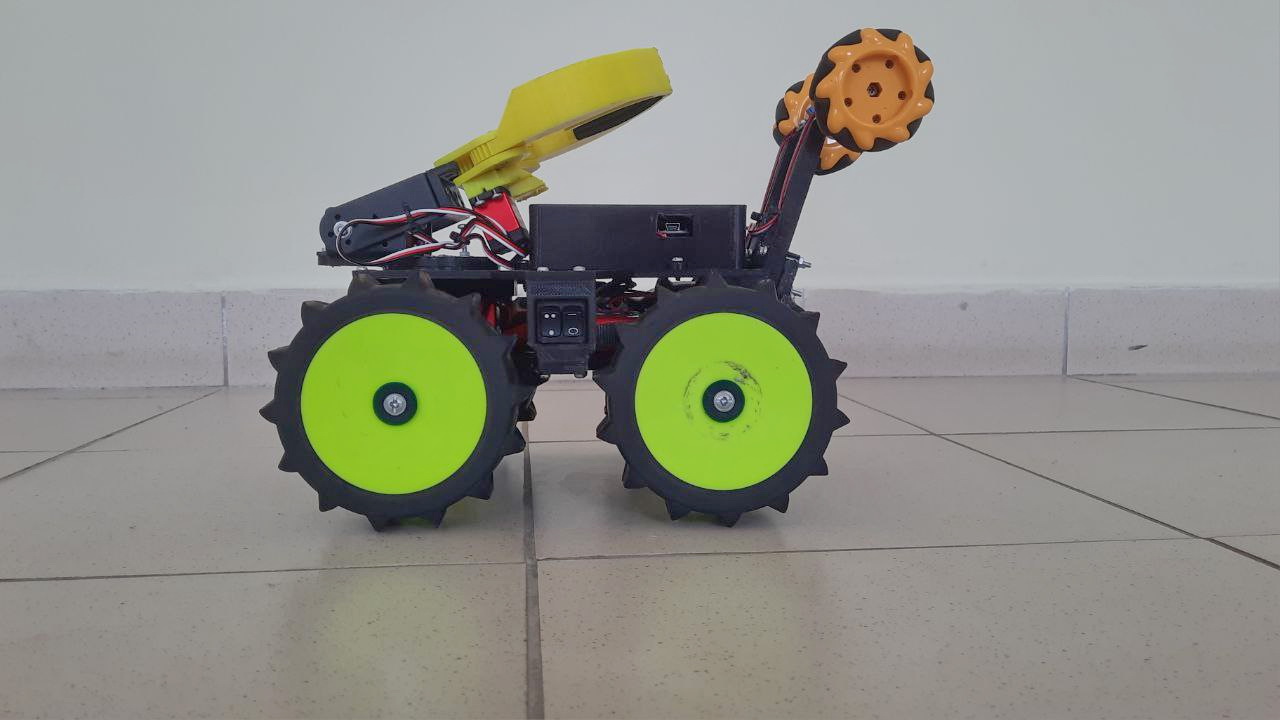
Робот перемещается с использованием танковой схемы управления, правая и левая сторона приводится в действие своим мотором. Это позволяет маневрировать в ограниченном пространстве и совершать развороты на месте.
Для преодоления препятствий типа ров или яма, а также для помощи при въезде на высокие преграды применяется задний манипулятор в виде тележки с дополнительной парой колес.
Спереди установлен основной манипулятор в виде клешни, двигающейся по вертикали и горизонтали. У клешни предусмотрен дополнительный сустав, позволяющий изменять угол захвата.
Питание робота производится от литий-полимерного аккумулятора напряжением 7.4В, скрытого внутри корпуса во избежание повреждений.
Робот оснащен датчиками линии для выполнения задания “следование по линии”
Additional files
{kind=link}
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
{kind=link}
Add at 27.12.2024