Girobot
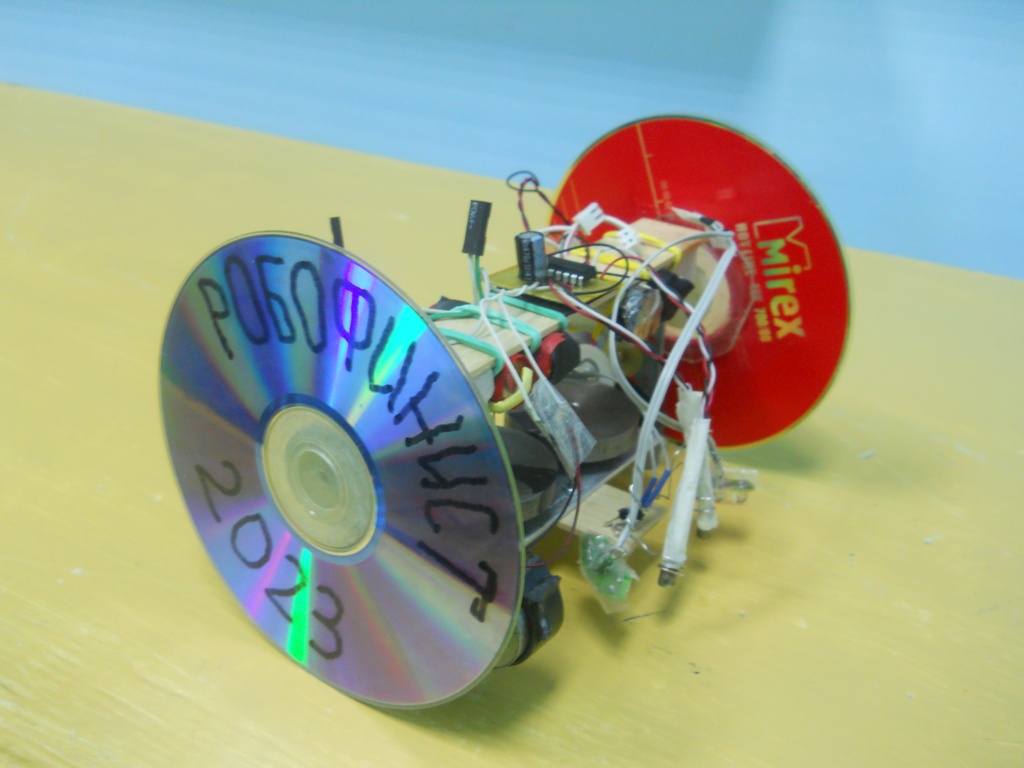
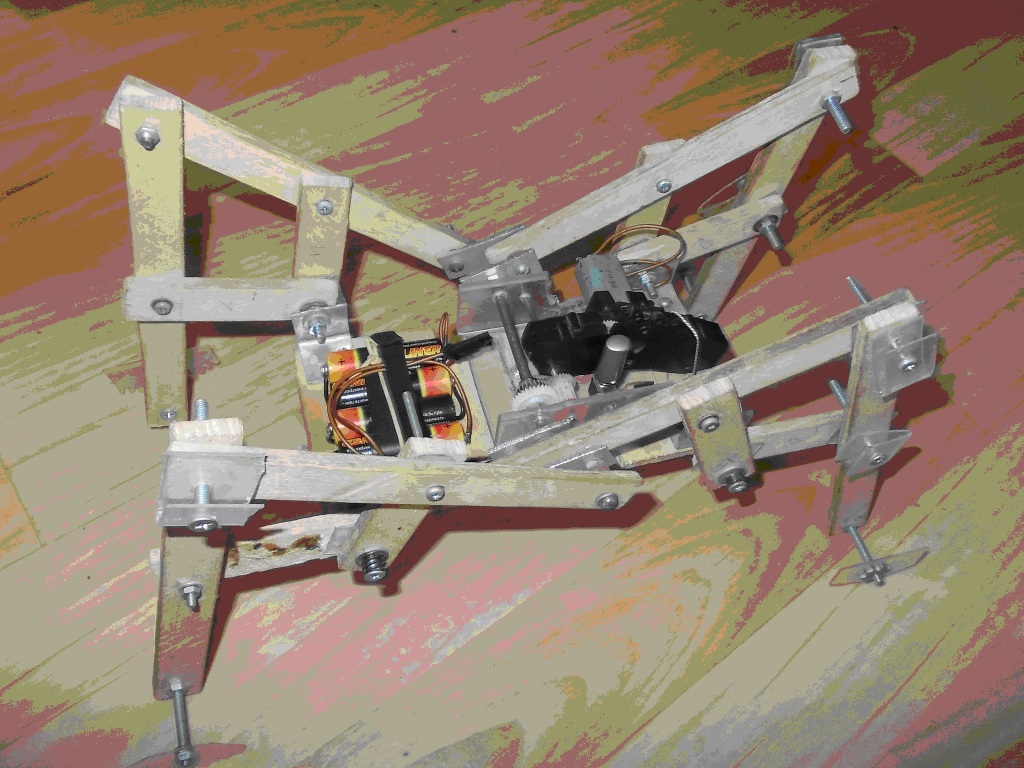
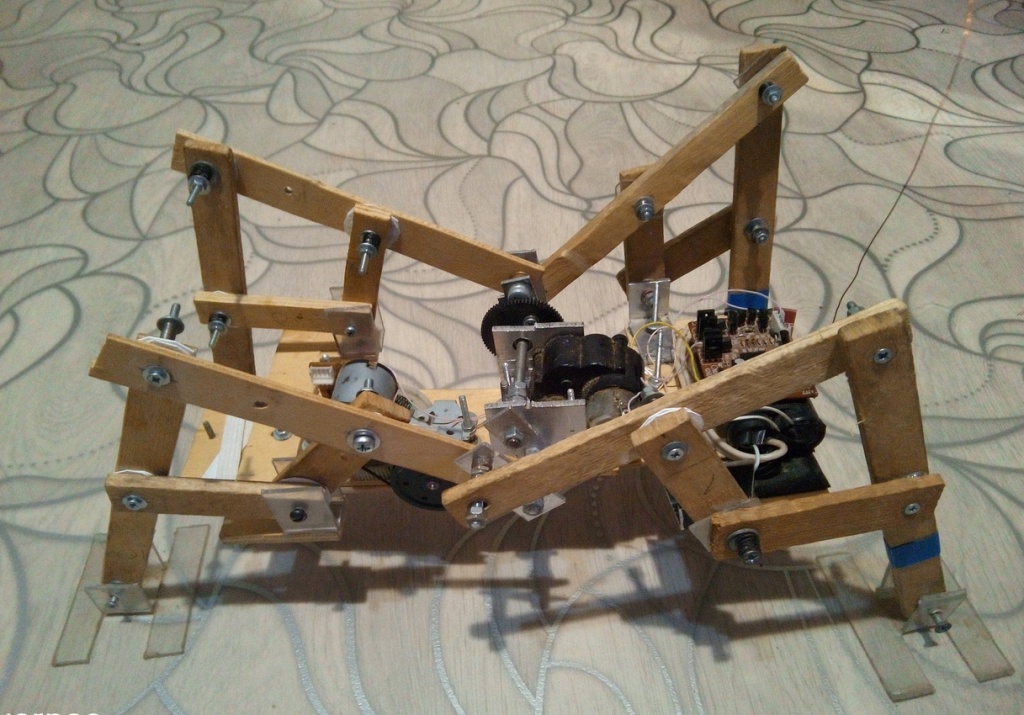
ROB-60689Общая концепция: робот должен отвечать главному условию – удерживаться и передвигаться на двух точках опоры. Достичь этого можно разными способами. Мы выбрали удержание за счёт низкого центра массы и больших колёс, по принципу детской игрушки-неваляшки, в сочетании с гироскопами. Гироскоп – обычно это быстро вращающийся массивный диск, за счёт момента инерции при вращении сохраняющий положение в пространстве. Наш балансирующий робот представляет собой рамочную конструкцию из алюминия, к которой на винтах прикреплены два редуктора с моторами и колёсами из дисковых приводов. Колёса – из дисков. На рамке прикреплены два мотора с гироскопами из стали, вращающиеся в горизонтальной плоскости. При включении питание подаётся на ходовые моторы и моторы гироскопов. После разгона гироскопов робот готов к движению.
Главная цель - создание конструкции балансирующего робота из доступных учащимся материалов, без сложных и дорогостоящих компонентов.
files
Add at 27.12.2024
Add at 27.12.2024
Additional files
{kind=link}
Add at 27.12.2024
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
Add at 27.12.2024
{kind=link}
Add at 27.12.2024
Add at 27.12.2024