- Narrow Line Follower
- Segway Race
- Stepping robots marathon
- Relay Race
- United teams relay
- The Journey: Junior
- The Journey: High
- Remote Controlled Football 4×4
- Lego Sumo (15 x 15 cm, 1 kg)
- Mini Sumo (10 x 10 cm, 500 g)
- Micro Sumo (5 x 5 cm, 100 g)
- Humanoid Sumo
- Corridor Rally
- Puck collect
- Arkanoid
- Aquarobots
- RobocupJunior onStage older
- Practical Robotics Olympiad: LEGO
- Practical Robotics Olympiad: TRIK
- Practical Robotics Olympiad: ARDUINO
- Freestyle category: Elementary
- Freestyle category: Junior High
- Freestyle category: High
- RoboCup Rescue Line
- RobocupJunior Rescue Maze
- RobocupJunior onStage junior
- RoboCup Junior Soccer Lightweight
- RoboCupJunior Soccer Open
- RoboCupJunior Humanoid Soccer
- Autonomous air vehicles
- Lunar craters
- RTC Cup: Seeker
- RTC Cup: Extremal
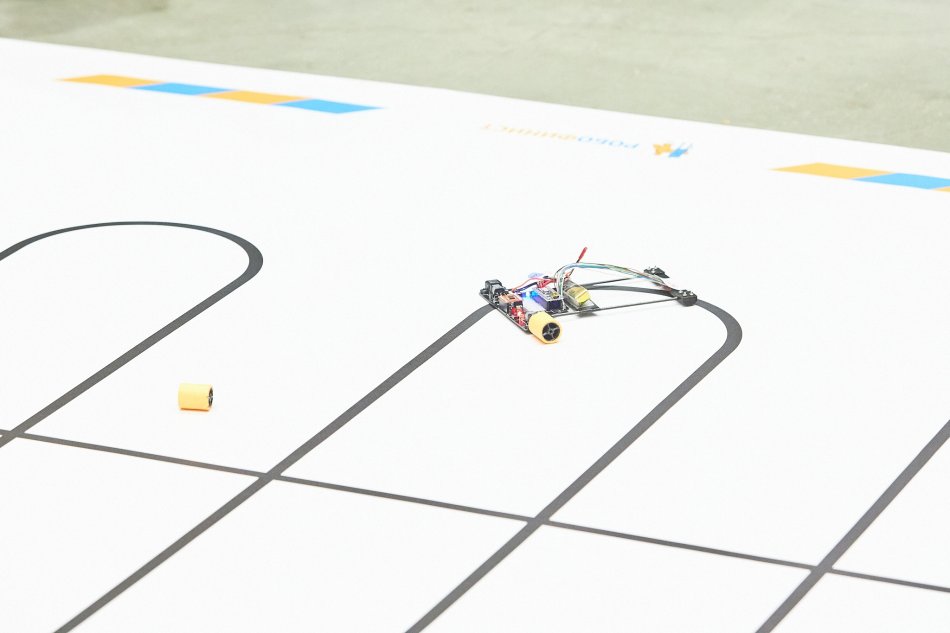
1 . Narrow Line Follower
Narrow Line Follower — these are competitions for the quickest. The winner is the owner of the robot that went along the track with all turns and obstacles in the shortest time. The robots, which take part in this competition, may have any construction.
Year of birth of participants: 2005 - 2024
2 . Segway Race
Segway is the robot using to move just two wheels. Robots-segways must overcome the obstacle course in the fastest time.
Year of birth of participants: 2005 - 2024
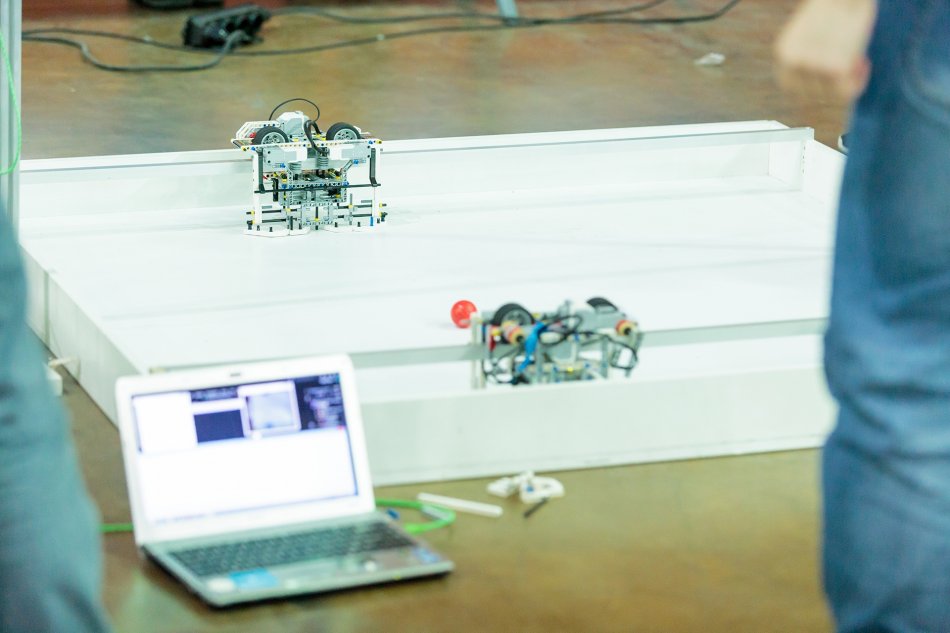
3 . Stepping robots marathon
The objective of this contest is to develop the robot with the special feet mechanism for the moving along the denoted trajectory at a step, run or jumps.
Year of birth of participants: 2005 - 2024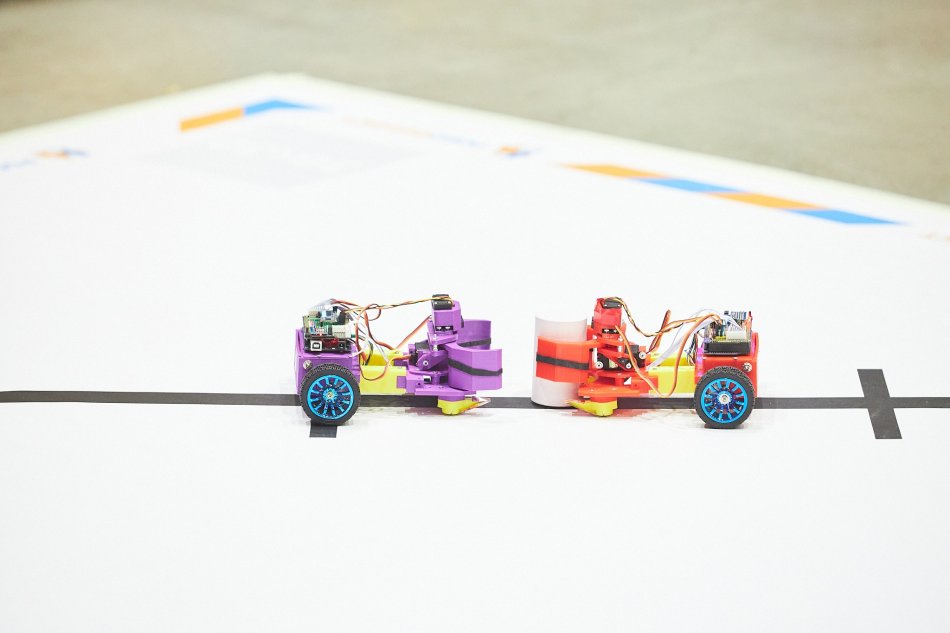
4 . Relay Race
During five minutes two robots of the same team shall drive the maximum number of laps along the line with a relay baton passing it every time in the exchange zone. The field is a white polygon with black line, crossroads and obstacles.
Year of birth of participants: 2009 - 2024 5 . United teams relay
Year of birth of participants: 2009 - 2024
6 . The Journey: Junior
"The Journey" is a complex type of contest combining several common tasks. Robot should do these tasks one by one without stops and pauses. Up to and including two members in team.
Year of birth of participants: 2012 - 2024
7 . The Journey: High
"The Journey" is a complex type of contest combining several common tasks. Robot should do these tasks one by one without stops and pauses. In the High category of the contest robot will have to go through the line with moving obstacle on it (robot should go round this obstacle and should not touch it), labyrinth, line with invertion after what kick out all but one the skittles from the ring in the Kegelring task. This skittle which robot should keep into the ring must be returned to the start - robot have to do all the tasks again! All these tasks must be done in five minutes.
Year of birth of participants: 2005 - 2024
8 . Remote Controlled Football 4×4
Polygon is the decreased copy of the actual football field. Simultaneously 8 robots compete on it and these robots are controlled by the same number of participants. The team task is to make a goal maximum possible times in the competitor’s goals.
Year of birth of participants: 2005 - 2024
9 . Lego Sumo (15 x 15 cm, 1 kg)
The contest is taking place on the ring where two robots are competing with each other. The ring is a black circle bordered with a white line. The objective of the robots participating in contest is to push its competitor out of the ring. This category is meant only for robots which construction is based on the educational construction kits (Lego, Fischertechnik, VEX, Huna, Robotis).
Year of birth of participants: 2009 - 2024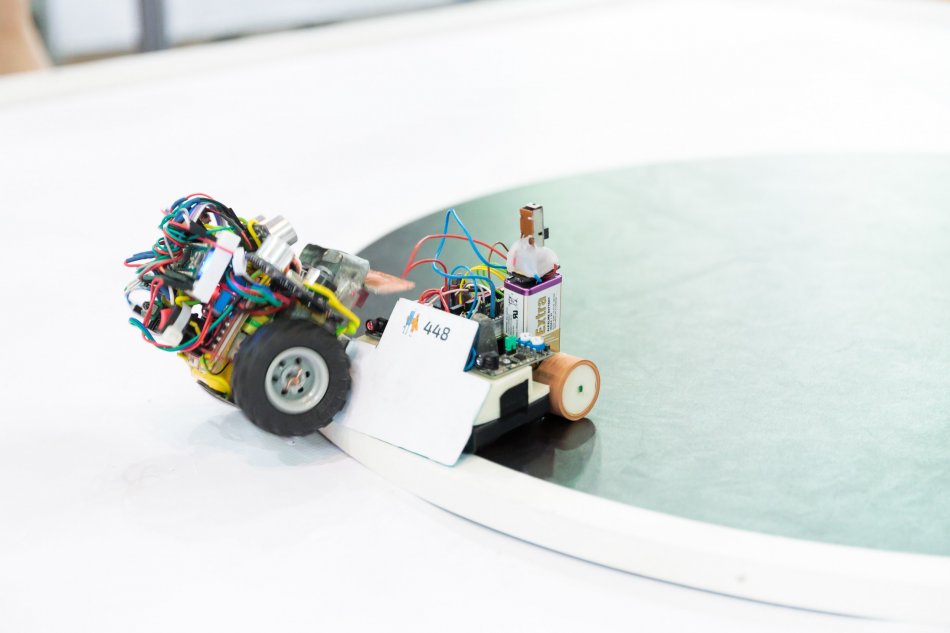
10 . Mini Sumo (10 x 10 cm, 500 g)
The competition is conducted for two robots on the ring that is black circle with white border line draw on ring perimeter. The aim of the competition is to push the robot-competitor outside the ring.
Year of birth of participants: no limits
11 . Micro Sumo (5 x 5 cm, 100 g)
The competition is conducted for two robots on the ring that is black circle with white border line draw on ring perimeter. The aim of the competition is to push the robot-competitor outside the ring.
Year of birth of participants: no limits
12 . Humanoid Sumo
The contest is proceeding between two robots on the ring which is black circle bordered with white line. The objective of the contest is to push the opponent robot out of the ring border. This cahtegory is only for humanoid robots.
Year of birth of participants: no limits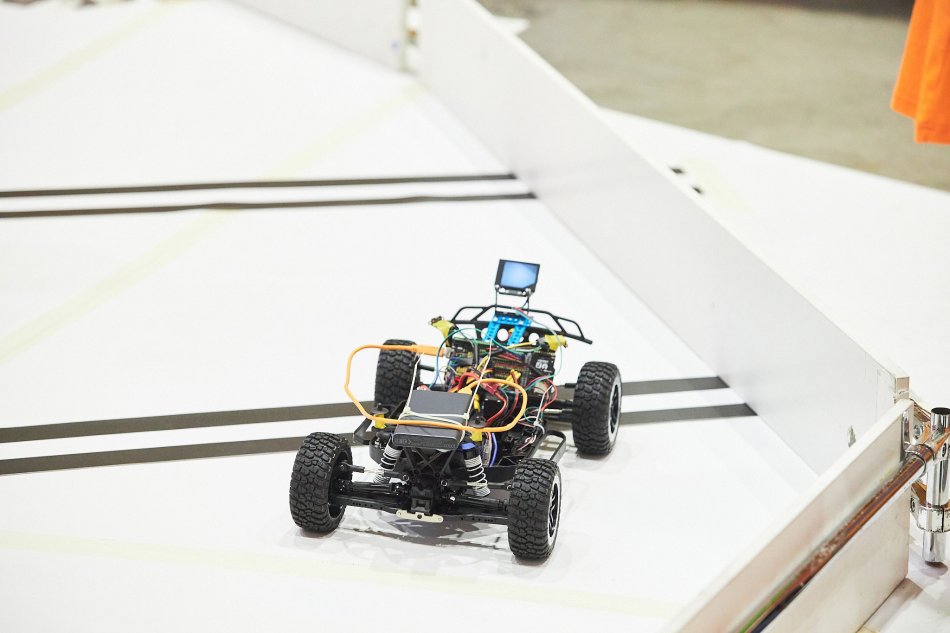
13 . Corridor Rally
The track for robot movement is a wavy corridor. In rally four-wheel cars take part with rear- or front-wheel drive and with steering front wheel. The competition itself consists of two stages. At the first stage the robot shall pass through the track from start to finish touching the wall the least possible number of times. At the second stage robots already participate by pairs. Robot wins if it reaches the finish first
Year of birth of participants: no limits
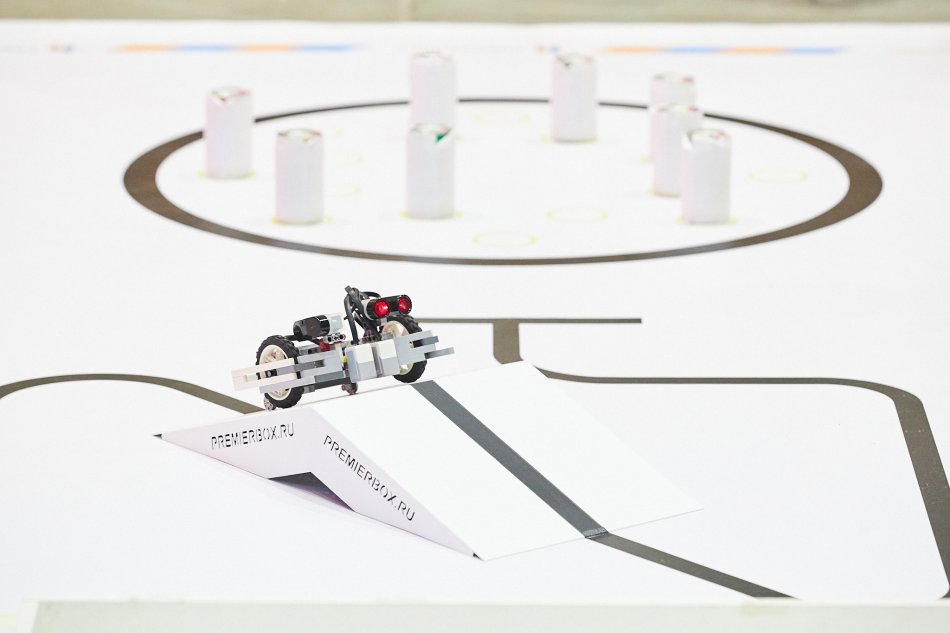
14 . Puck collect
This competition calls for special interaction between sensor technology, mechanics and artificial intelligence. Here the robots have to collect small discs ("pucks") on the field according to color.
Two robots compete against each other on a 250 x 250 cm field. The aim is to collect all pucks of the assigned color and carry them to the own home base. The first robot to collect all the assigned pucks wins.
15 . Arkanoid
In the competition it is necessary to design and build a robot, which can play the game arkanoyd with the opponent. The robot moves along the rack on the side of the field controlled by a computer with help of a camera mounted above the field. The task of the robot is to roll the ball to the opponent's side.
Year of birth of participants: no limits
16 . Aquarobots
In the aquarobot competition, participants will have to design and program a robot that can stay afloat and perform tasks. The robot will have to move along the sides of the pool, as well as identify and bypass the buoys. 4 exercises will allow you to determine the fastest, dexterous and smart waterfowl robot.
Year of birth of participants: no limits
17 . RobocupJunior onStage older
RobocupJunior onStage allows teams to present a 1-2 minute performance using standalone robots, designed, built and programmed by the team. These competitions are open. They include all kinds of performance, it can be dancing, history, theatrical performance or art installation. The performance can be accompanied by music. The team can use any number of robots on the scene.
Year of birth of participants: 2005 - 2024
18 . Practical Robotics Olympiad: LEGO
At the beginning of this category all participants will receive unusual robotics tasks that shall be resolved within the specified time.
Year of birth of participants: 2009 - 2024 19 . Practical Robotics Olympiad: TRIK
At the beginning of this category all participants will receive unusual robotics tasks that shall be resolved within the specified time.
Year of birth of participants: 2005 - 2024 20 . Practical Robotics Olympiad: ARDUINO
At the beginning of this category all participants will receive unusual robotics tasks that shall be resolved within the specified time.
Year of birth of participants: no limits
21 . Freestyle category: Elementary
In this category participants are free to create robots with no limits in tasks, objectives and rules. Creators are limited only in their own imagination. The winner is selected by the count of referees in the several criteria: Relevance, Novelty, Engineering complexity, Operability, Presentation, Aesthetics. Primary criteria is that it should be a ROBOT. The age limit in this category is 12 years.
Year of birth of participants: 2012 - 2024 22 . Freestyle category: Junior High
In this category participants are free to create robots with no limits in tasks, objectives and rules. Creators are limited only in their own imagination. The winner is selected by the count of referees in the several criteria: Relevance, Novelty, Engineering complexity, Operability, Presentation, Aesthetics. Primary criteria is that it should be a ROBOT. The age limit in this category is from 12 to 15 years.
Year of birth of participants: 2009 - 2024 23 . Freestyle category: High
In this category participants are free to create robots with no limits in tasks, objectives and rules. Creators are limited only in their own imagination. The winner is selected by the count of referees in the several criteria: Relevance, Novelty, Engineering complexity, Operability, Presentation, Aesthetics. Primary criteria is that it should be a ROBOT. The age limit in this category is from 16 years.
Year of birth of participants: 2005 - 2024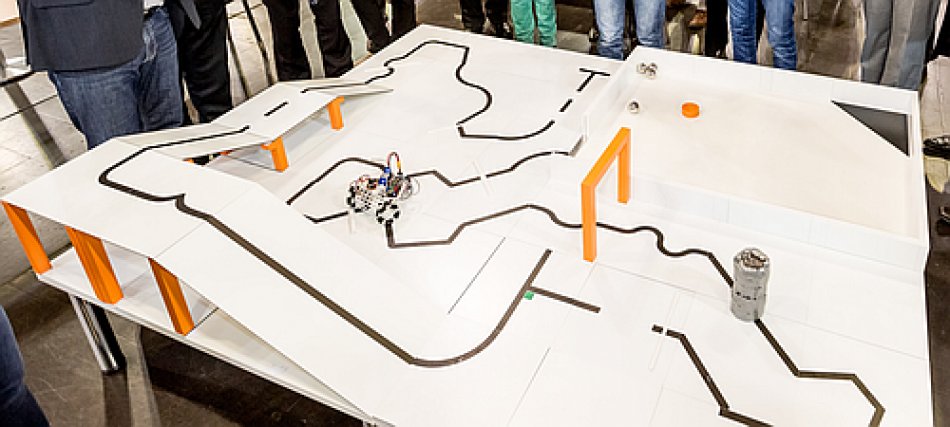
24 . RoboCup Rescue Line
The robot must be able to carry out the rescue mission in a fully autonomous mode with no human assistance. The robot must be durable and intelligent enough to navigate through treacherous terrain with hills, uneven land and rubble without getting stuck. When the robot finally finds the victims, it has to gently and carefully transport the victims to the safe evacuation point where humans can take over the rescue. After the victim rescue, the robot should be able to find its way out of the dangerous area.
Year of birth of participants: 2005 - 2024
25 . RobocupJunior Rescue Maze
The robot must be able to carry out the rescue mission in a fully autonomous mode with no human assistance. The robot must be durable and intelligent enough to navigate through treacherous terrain with hills, uneven land and rubble without getting stuck. The robot must search for victims, dispense rescue kits.
Year of birth of participants: 2005 - 2024 26 . RobocupJunior onStage junior
RobocupJunior onStage allows teams to present a 1-2 minute performance using standalone robots, designed, built and programmed by the team. These competitions are open. They include all kinds of performance, it can be dancing, history, theatrical performance or art installation. The performance can be accompanied by music. The team can use any number of robots on the scene.
Year of birth of participants: 2005 - 2024
27 . RoboCup Junior Soccer Lightweight
2-on-2 teams of autonomous mobile robots play in a highly dynamic environment, tracking a special light-emitting ball in an enclosed, landmarked field. The robots used must be autonomous, designed and programmed by the team. Competitors must demonstrate their skills in programming, robotics, electronics and mechanics, as well as the ability to work in a team.
Year of birth of participants: 2005 - 2024 28 . RoboCupJunior Soccer Open
2-on-2 teams of autonomous mobile robots play in a highly dynamic environment. The robots used must be autonomous, designed and programmed by the team. Competitors must demonstrate their skills in programming, robotics, electronics and mechanics, as well as the ability to work in a team.
Year of birth of participants: 2005 - 2024
29 . RoboCupJunior Humanoid Soccer
Year of birth of participants: no limits

30 . Autonomous air vehicles
The robot designed by the participant will perform tasks without touching the ground and air obstacles. During the summer time, you need to score as many points as possible by completing various tasks.
Year of birth of participants: no limits
31 . Lunar craters
The Moon is the closest celestial body to the Earth, on which the interest of mankind is concentrated. Currently, one of the main areas of research is the search for water on the moon. We believe that the creation of cosmodromes on the Moon, observatories with the most powerful telescopes, bases for their maintenance, exploration and extraction of rare minerals is not far off. Water will be needed for drinking, and for technical needs, and to replenish oxygen supplies. Now on the Moon they are looking not for vast water basins, but for ice, which can be located in places protected from the rays of the Sun, for example, at the bottom of some lunar craters. The task "Moon Craters" is intended to create an autonomous Lunokhod capable of overcoming craters and delivering useful rocks to the Lunar Station
Year of birth of participants: no limits
32 . RTC Cup: Seeker
In «RTC Cup» Challenge the robot shall pass through the proving ground within the specified time. The proving ground is a reconfigurable obstacle course, a maze, made of cells. The maze made to resemble different indoor and outdoor terrains and obstacles, for search and rescue scenario. For each cell robot gain points, the number of points depend on difficulty of the task, located in the cell.
"Seeker" category: remote robot control that is visible for the operator.
Year of birth of participants: 1925 - 2017 33 . RTC Cup: Extremal
In «RTC Cup» Challenge the robot shall pass through the proving ground within the specified time. The proving ground is a reconfigurable obstacle course, a maze, made of cells. The maze made to resemble different indoor and outdoor terrains and obstacles, for search and rescue scenario. For each cell robot gain points, the number of points depend on difficulty of the task, located in the cell.
"Extremal" categorie: remote robot control using only the picture from the camera and data of the robot sensors.
Year of birth of participants: 1925 - 2017
34 .
Year of birth of participants: 1925 - 2006