- Line Follower (Qualification)
- Relay Race
- Labyrinth 2
- Humanoid Sprint
- Air Race
- Corridor Rally (Qualification)
- Lego Sumo (15 x 15 cm, 1 kg)
- Mini Sumo (10 x 10 cm, 500 g)
- Micro Sumo (5 x 5 cm, 100 g)
- Remote Controlled Football 3×3
- Remote Controlled Football 5×5
- WRO GEN II Football
- RTC Cup - Seeker
- RTC Cup - Extremal
- Freestyle category (Elementary)
- Freestyle category (Junior High)
- Freestyle category (High)
- Line Follower (Lego, Fischertechnik, VEX) Qualification
- Craters of the Moon
- Practical Robotics Olympiad (High)
- Segway Race (Autonomous)
- Line - Pro
- RTC Cup - Rescuer
- Line Follower
- Line Follower (Lego, Fischertechnik, VEX)
- Corridor Rally
- Practical Robotics Olympiad (Junior High)
- Segway Race (Remote control)
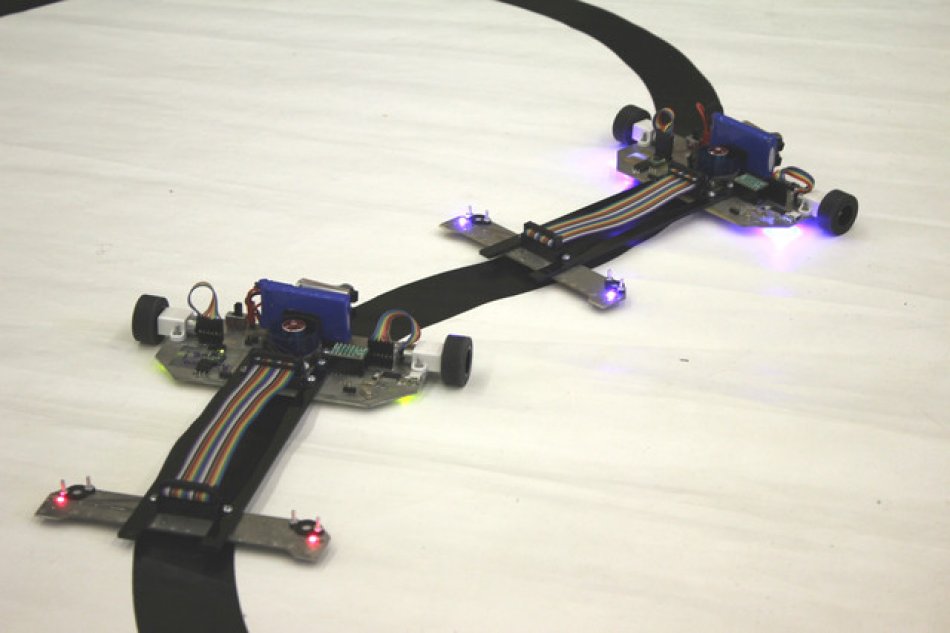
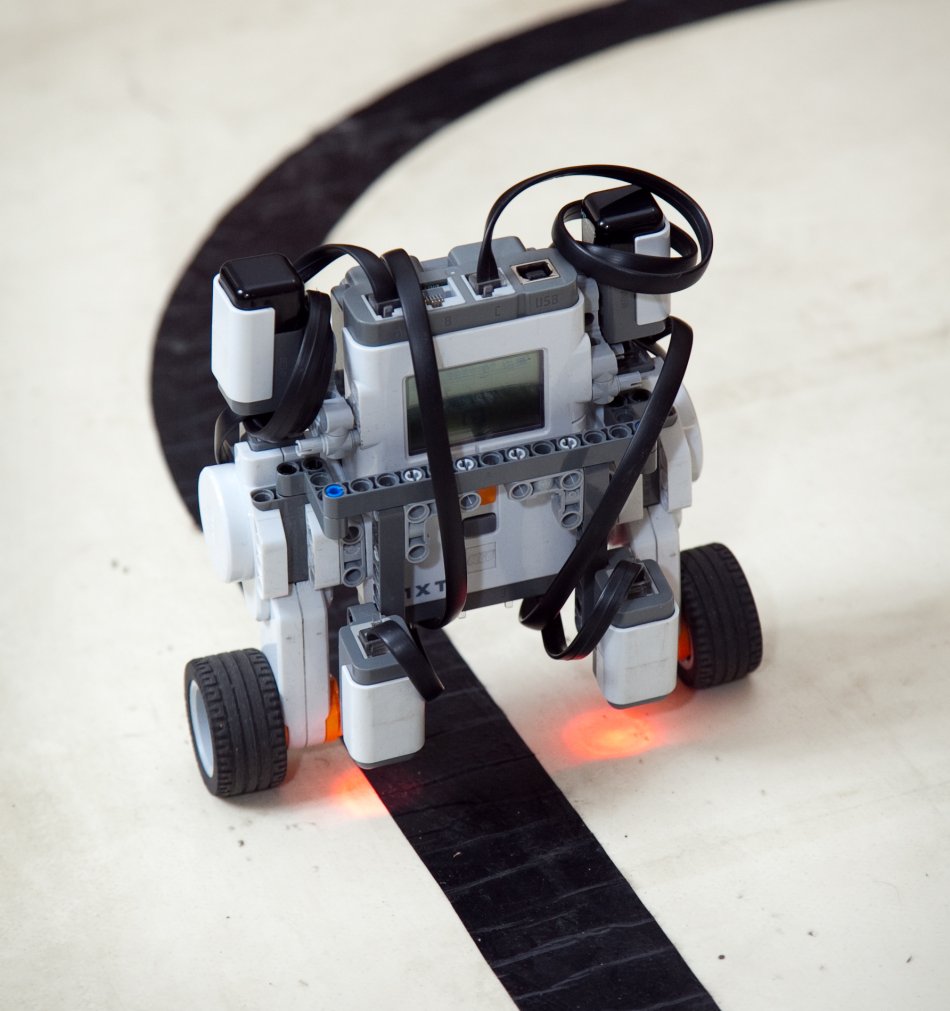
1 . Line Follower (Qualification)
Robot’s task in this kind of the competition is to overcome the track along the black line for the least possible time. The robot shall drive along the black line in auto mode.
Year of birth of participants: no limits
2 . Relay Race
During 5 minutes two robots of the same team shall drive the maximum number of laps along the line with a relay baton passing it every time in the exchange zone. The field represents white polygon with black line and crossroads.

3 . Labyrinth 2
Robot’s task is to find exit from the labyrinth for the least possible time. Before each heat start labyrinth configuration is changed and before each robot start the referee chooses the direction towards which the robot will look.

4 . Humanoid Sprint
The polygon is a corridor through which the humanoid shall pass for the least possible time. A robot in this type of competition is a two-legged walking humanoid capable of moving its center of mass in order to maintain balance while walking.

5 . Air Race
Robots move over the air without touching the ground and air obstacles. There two columns on the polygon around which the robot shall fly maximum possible times. The task is complicated because the path along which the robot shall fly around the obstacles shall have “8”-shape.

6 . Corridor Rally (Qualification)
The track for robot movement is a wavy corridor. In rally four-wheel cars take part with rear- or front-wheel drive and with steering front wheel. The competition itself consists of two stages. At the first stage the robot shall pass through the track from start to finish touching the wall the least possible number of times. At the second stage robots already participate by pairs. Robot wins if it reaches the finish first.
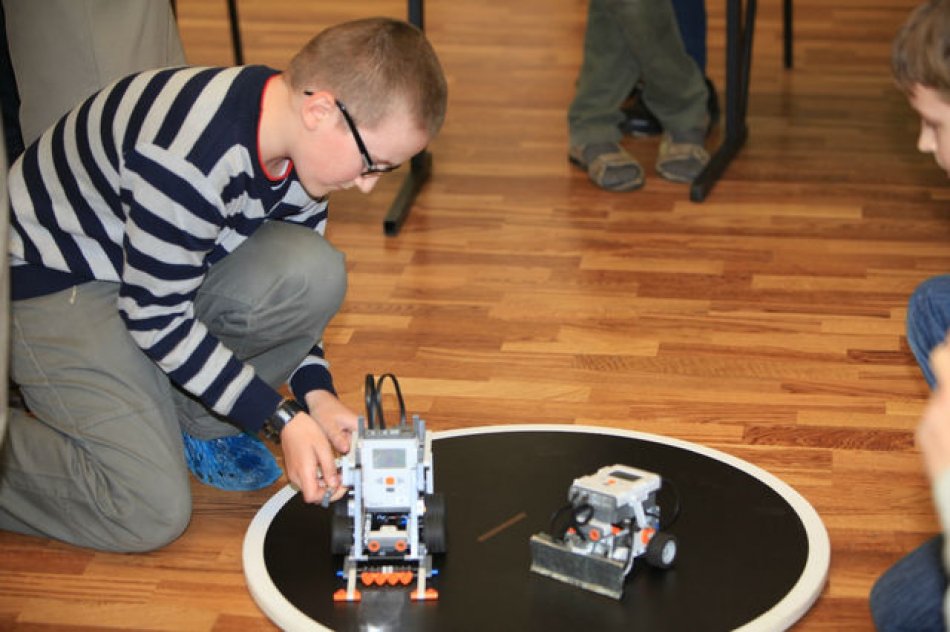
7 . Lego Sumo (15 x 15 cm, 1 kg)
The competition is conducted for two robots on the ring that is black circle with white border line draw on ring perimeter. The aim of the competition is to push the robot-competitor outside the ring.

8 . Mini Sumo (10 x 10 cm, 500 g)
The competition is conducted for two robots on the ring that is black circle with white border line draw on ring perimeter. The aim of the competition is to push the robot-competitor outside the ring.
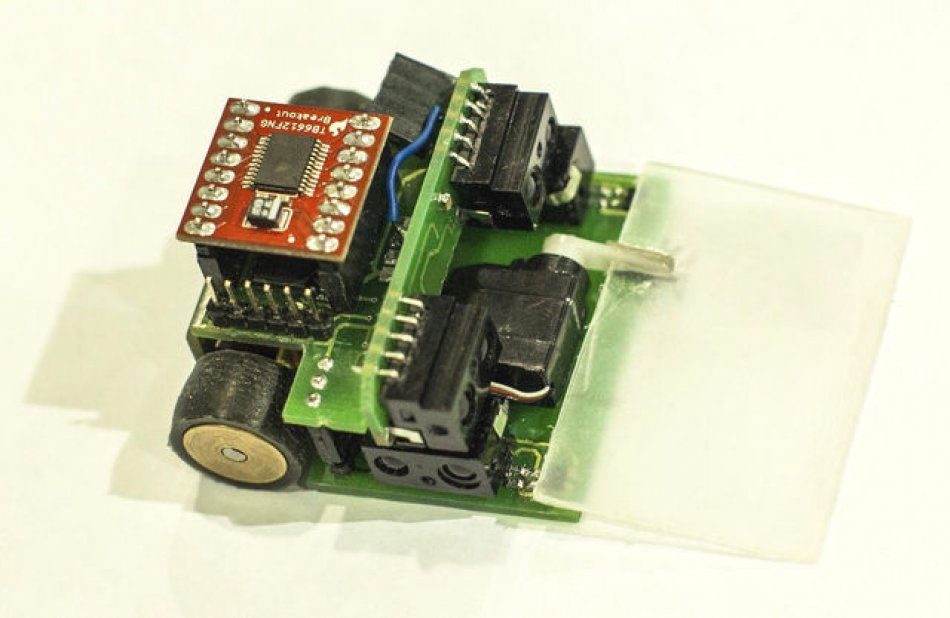
9 . Micro Sumo (5 x 5 cm, 100 g)
The competition is conducted for two robots on the ring that is black circle with white border line draw on ring perimeter. The aim of the competition is to push the robot-competitor outside the ring.
10 . Remote Controlled Football 3×3
Polygon is the decreased copy of the actual football field. Simultaneously 6 robots compete on it and these robots are controlled by the same number of participants. The team task is to make a goal maximum possible times in the competitor’s goals.

11 . Remote Controlled Football 5×5
Polygon is the decreased copy of the actual football field. Simultaneously 10 robots compete on it and these robots are controlled by the same number of participants. The team task is to make a goal maximum possible times in the competitor’s goals.

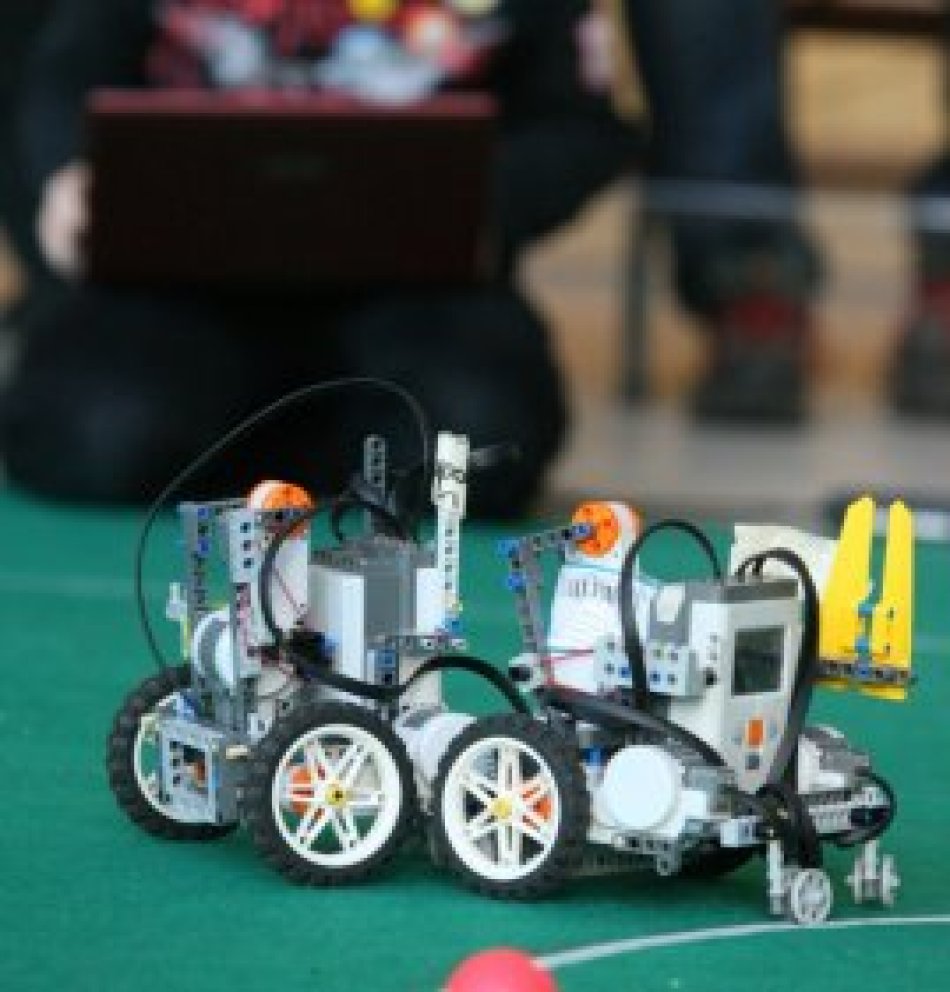
12 . WRO GEN II Football
Autonomous robot football save only some things from the real football. The field consists of several green gradations and white out lines on perimeter. Two teams with two robots in each team compete. In contrast to the controlled football it is prohibited any interaction between robots and people, robots can exchange data (e.g. about ball location). However inspite of such significant differences between tis type of football and the actual football, the aim is still the same - make a goal maximum possible times.

13 . RTC Cup - Seeker
In «RSSC RTC Cup» competition the robot shall pass through the obstacle course within the specified time. When passing the stand the robot shall collect special «cans», positioned on the polygon and locate them in special colour zones according to the «can» colour.
Polygon is a reconfigurable obstacle course, which consists of the typical obstacles to overcome which the mobile robot shall be designed.
Competitions are conducted in two modes: control of the robot that is visible for the operator and remote robot control using only the picture from the camera and data of the robot sensors.

14 . RTC Cup - Extremal
In «RSSC RTC Cup» competition the robot shall pass through the obstacle course within the specified time. When passing the stand the robot shall collect special «cans», positioned on the polygon and locate them in special colour zones according to the «can» colour.
Polygon is a reconfigurable obstacle course, which consists of the typical obstacles to overcome which the mobile robot shall be designed.
Competitions are conducted in two modes: control of the robot that is visible for the operator and remote robot control using only the picture from the camera and data of the robot sensors.

15 . Freestyle category (Elementary)

16 . Freestyle category (Junior High)

17 . Freestyle category (High)

18 . Line Follower (Lego, Fischertechnik, VEX) Qualification
Robot’s task in this kind of the competition is to overcome the track along the black line for the least possible time. The robot shall drive along the black line in auto mode. This category is intended only for robots created based on the constructor Lego, Fischertechnik or VEX.
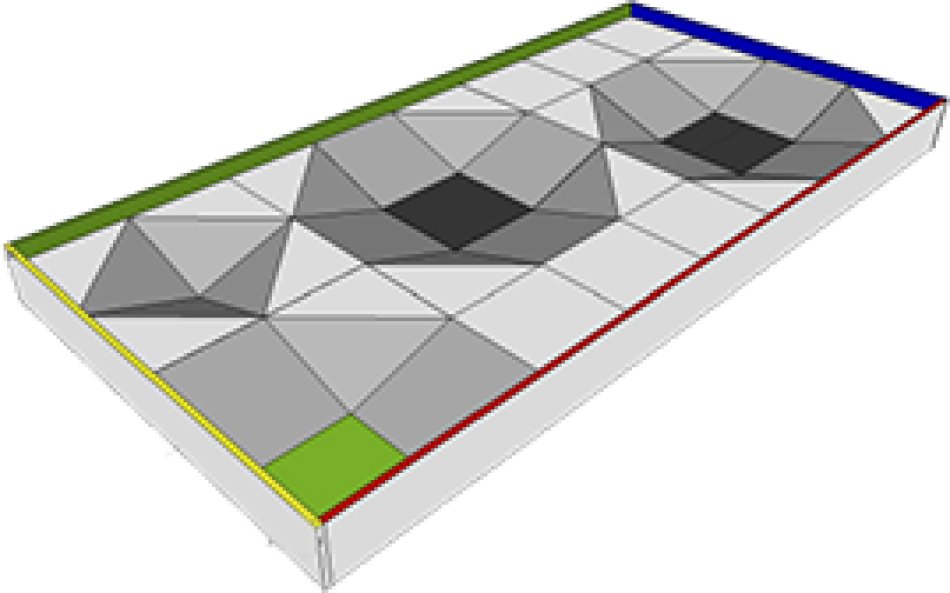
19 . Craters of the Moon
20 . Practical Robotics Olympiad (High)
At the beginning of this category all participants will receive unusual robotics tasks that shall be resolved within the specified time.
21 . Segway Race (Autonomous)
Segway is the robot using to move just two wheels. Robots-segways must overcome the obstacle course in the fastest time. Depending on the category, the robot can be both autonomous and controlled.

22 . Line - Pro
The contest is continuation of the event “Following the Line”, the only difference consisting in the black line replaced with a line of uniform objects. The robot’s assignment is the same: get from the start to the finish as soon as possible.
23 . RTC Cup - Rescuer
24 . Line Follower
Robot’s task in this kind of the competition is to overcome the track along the black line for the least possible time. The robot shall drive along the black line in auto mode.
25 . Line Follower (Lego, Fischertechnik, VEX)
Robot’s task in this kind of the competition is to overcome the track along the black line for the least possible time. The robot shall drive along the black line in auto mode. This category is intended only for robots created based on the constructor Lego, Fischertechnik or VEX.
26 . Corridor Rally
The track for robot movement is a wavy corridor. In rally four-wheel cars take part with rear- or front-wheel drive and with steering front wheel. The competition itself consists of two stages. At the first stage the robot shall pass through the track from start to finish touching the wall the least possible number of times. At the second stage robots already participate by pairs. Robot wins if it reaches the finish first.
27 . Practical Robotics Olympiad (Junior High)
At the beginning of this category all participants will receive unusual robotics tasks that shall be resolved within the specified time.
28 . Segway Race (Remote control)
Segway is the robot using to move just two wheels. Robots-segways must overcome the obstacle course in the fastest time. Depending on the category, the robot can be both autonomous and controlled.